



Precision is designed, not accidental. Warehouse robots and drones require centimetre-level accuracy beyond the capability of standard global navigation satellite systems. Achieving this requires the right positioning technology, antenna design, sensor fusion, and verification. Electronics must be engineered to deliver reliable positioning in challenging environments. So how is it done?
Imagine a robot moving through warehouse aisles, picking the required items from among many others lying in storage racks. Or a drone flying through a dense forest, reaching every checkpoint within centimetres. Such tasks are usually performed with the help of high-precision global navigation satellite system (GNSS) technology.
For R&D engineers working on such projects, the key question is not “Can we do it?” but “How do we design for consistent accuracy?” Standard GNSS, like that used in phones or cars, is not enough. Signals can bounce, drift, or get blocked. The atmosphere and hardware can also introduce errors.

The environment also affects accuracy. In cities, signals reflect off tall buildings, leading to positioning errors. In forests, trees block signals, reducing the reliability of positioning.
| Sources of Error | |
| Error Source | Why It Matters |
| Satellite clock and orbit errors | Satellites are not perfect, and orbit information has small inaccuracies |
| Ionospheric and tropospheric delays | Signals slow down and shift as they pass through the atmosphere layers |
| Receiver and antenna biases | The hardware itself introduces minor errors |
| Multipath effects | Signals bounce off buildings or other objects, confusing the receiver |
Precision positioning
Conventional GNSS, like the one in a smartphone, offers 5-10 metres of accuracy. This is generally sufficient for navigation and route planning. However, many applications require much higher precision down to 10cm or even 1cm.
Autonomous vehicles, for instance, need accurate positioning to change lanes safely and avoid obstacles. Even a 0.5-metre error can cause serious problems. In precision agriculture, tractors spread fertiliser with centimetre-level accuracy to reduce waste. GNSS with ±2.5cm accuracy can guide automated steering in large farms.
Surveying drones and inspection robots also rely on precise positioning. Errors of a few metres can disrupt missions and produce unreliable results. Industrial autonomous systems in warehouses and factories need centimetre accuracy to operate safely alongside people and machines.
Centimetre-level accuracy in such instances is a great boon, but we should also try to understand why it is difficult to achieve it. Standard GNSS performance can be affected by several sources of error (see table).
Possible solutions
Improving beyond the 5-10-metre accuracy of standard GNSS is not just about better hardware; it requires asking the right questions. Which correction method fits the application? How is the system designed? Which errors must the signal processing handle?
Centimetre-level accuracy requires correcting common errors. Atmospheric delays can slow signals. Satellite clock errors and small orbit inaccuracies also affect results. Signals may reflect off buildings or the ground before reaching the receiver. Each error seems minor, but together they significantly reduce accuracy.
The primary challenge lies in selecting the most suitable correction approach. Design engineers must balance infrastructure needs, convergence time, scalability, system complexity, and cost.
Solution A. Precision positioning solutions
Centimetre-level positioning is not just about selecting a high-performance GNSS receiver. It depends on choosing the right correction method for the application.
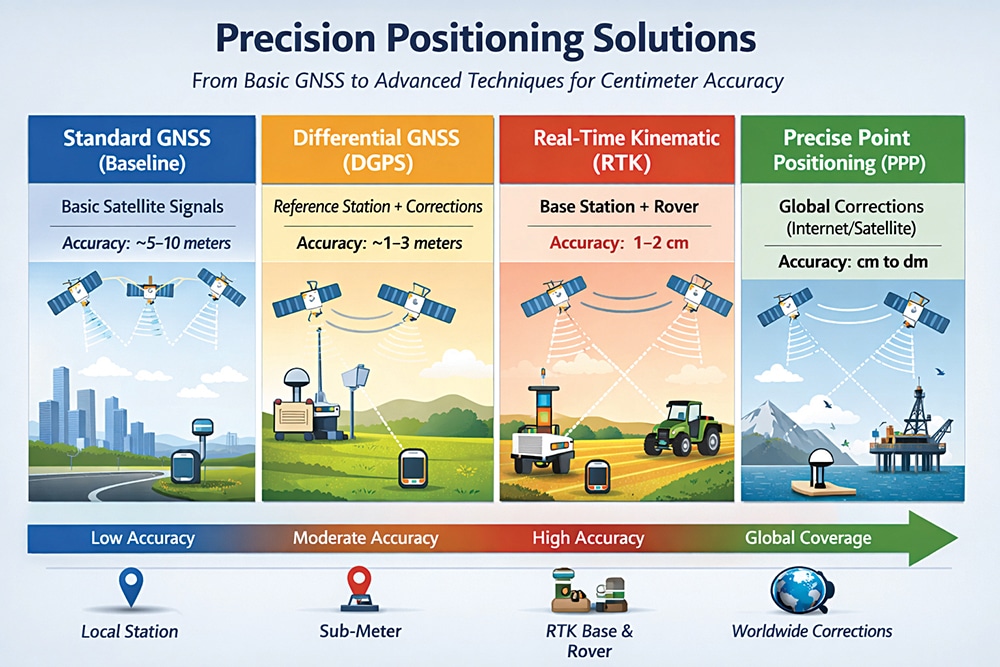
Standard GNSS systems, such as the Global Positioning System, Galileo, and GLONASS, provide accuracies of two to five metres. This level of precision is suitable for tracking but not for precise control.
Differential global positioning system (DGPS) improves accuracy to the sub-metre level. It works well for mapping and maritime use. However, it cannot reliably achieve centimetre-level precision.
For precision agriculture, surveying, drones, and robotics, real-time kinematic (RTK) is widely used. RTK relies on a base station and a rover. The base station sends carrier-phase corrections in real time via the internet, radio, or cellular links.
This enables fast, multi-band positioning with hardware such as the ZED-F9P from u-blox. It is commonly integrated into systems from John Deere and DJI.
The main drawback is the requirement for continuous correction connectivity and supporting local infrastructure.
Precise point positioning (PPP) removes the need for a local base station. It uses precise satellite orbit and clock corrections delivered via satellite or the internet from global networks.
After a convergence period ranging from several minutes to about 30 minutes, PPP achieves centimetre-to-decimetre accuracy worldwide. This makes it suitable for offshore operations, mining, and global fleets. Examples include Trimble RTX and Topcon correction services.
However, PPP requires longer initialisation times, reliable connectivity, and higher processing power. Hybrid PPP-RTK combines global corrections with fast ambiguity resolution similar to RTK. It offers quicker convergence than standalone PPP while maintaining wide-area scalability.
Achieving centimetre-level accuracy requires balancing correction strategy, communication reliability, convergence time, scalability, and system complexity to match mission requirements.
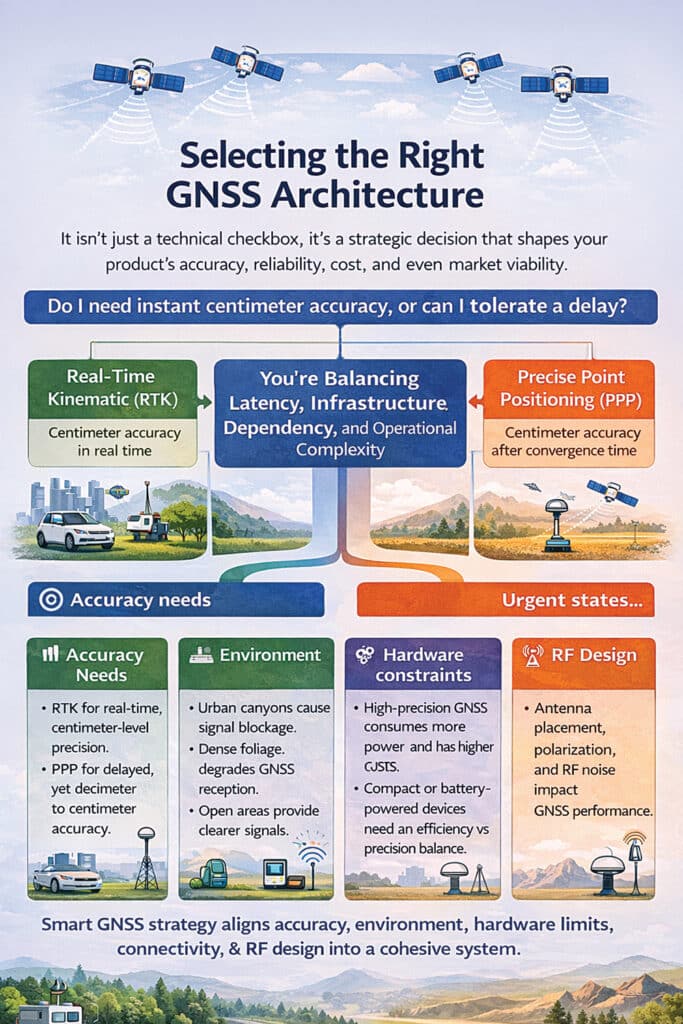
Solution B. Selecting the right GNSS architecture
