



There are concerns about the increasing use of robots and their role in society. Robots have replaced humans in performing repetitive and dangerous tasks which humans either prefer not to do or are unable to do because of size limitations. Robots may be constructed to take on humanoid form, but most robots are machines designed to perform a task with no regard to how the look. A robot can be guided by an external control device or control may be embedded within. The use of robots is increasing day by day in military combat. Humanoid robots are now used as a research tool in several scientific areas.
The era of humanoids
There are many humanoid robots in the world. Humanoid robots are being developed to perform human tasks like personal assistance, where the able to assist the sick and elderly and dirty or dangerous jobs. There are many humanoid robots like Ursula, the female that sings, plays music, dances and speaks to her audience at Universal studios. Then there’s the Asimo robot, which can walk and run as fast as 6km\hrs or 4.3mph. It also performs basic tasks like holding a platter and serving food. POPPY is another robot designed to conduct scientific experiments. Romeo robot which designed to avoid the risk of injury to the person that will attend. iCub robot was designed to test hypothesis. There are many humanoids under development, but here we focus on the advancing humanoid robot Atlas, by Boston Dynamics.
Atlas: A step ahead
Atlas is a bipedal humanoid robot primarily developed by the American robotics company Boston Dynamics, with funding and oversight from the United States Defence Advanced Research Projects Agency(DARPA). Atlas is based on Boston Dynamics earlier PETMAN humanoid robot. It has four hydraulically actuated limbs. It has constructed of aluminium and titanium. There are many actuators are use in humanoid robots like pneumatic, piezoelectric or ultrasonic. But In Atlas, hydraulic actuator is used in which a cylinder or fluid motor that converts hydraulic power into useful mechanical work. Atlas holds the title of one of the most advanced humanoid robot ever built. Atlas is about to create the most realistic and accurate representation of human movement possible. The reason behind this humanoid robot’s success manifests itself in 28 individual hydraulic joints which gives Atlas a full range of motion. Atlas can use all four limbs to navigate through rough terrains and access hazardous areas which a human being could not.
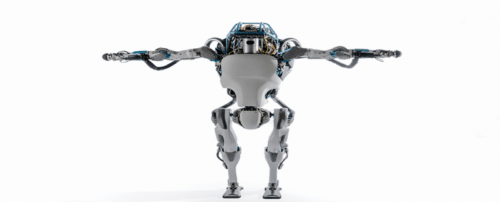
There was a time before Atlas performed backflips, when robots were only for vacuuming and factories, none of the useful once were humanoid. Now we are living in era where humanoid robots are seemingly as smart as we are. A humanoid robot is a robot with its body shape built to match the human body. In general humanoid robots have a torso, two arms, two legs, a head and some humanoid robots also have heads designed to simulate human face very similar to the ones in I-robot. This robot design may interact with human tools and environment for do experiments, study of locomotion or many other purpose. Smart robotics are going to be a key driver of the next stage of the information revolution. Atlas is the latest in a line of advanced humanoid robots has been developed. Atlas control system coordinates motions of the arms, torso and legs to achieve whole body mobile manipulation greatly expanding it.

The development of the humanoid
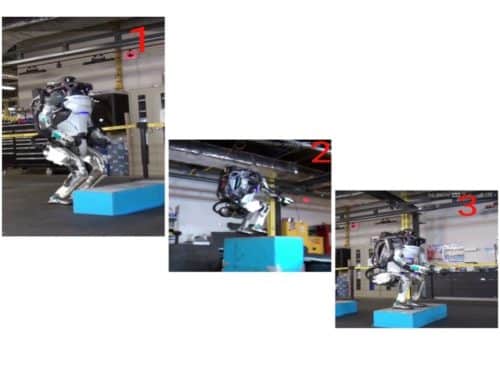
Some other robots have been shown performing backflips in the past, but Boston Dynamic introduced new robot called handle with a four-foot vertical jump, but it was a wheeled robot. All it needed of software improvement it gets the balancing algorithm and see we could finally have jumping robots. A humanoid strong enough to jump like that is capable of any typical human motion. Atlas is now capable of much more specific and complex movements. Atlas can easily leap from one box to another, jump and torques its full 180lb body in a 180degree turn. It can perform backflip landing safely on its feet. This robot is not only good at backflip but also at strenuous activities like lifting loads and placing them back. Atlas can balance while performing task allowing it to work in a large capacity.
The atlas hardware is built out of 3D printing to save weight and space. It has a high strength to weight ratio. It can get up by itself after falling.
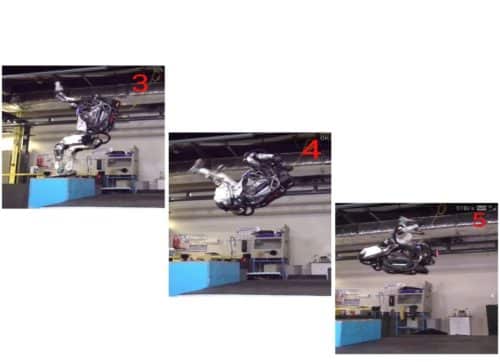
Sitting down, standing up, getting in and out of cars, stairs, ground, all moves which are performed by humans who cannot land a backflip. A backflip is an amazing and talented work of mechanical engineers and software controllers. It’s all about balancing and power. Atlas is about to create the most realistic and accurate representation of human movement possible.

Sensing plays an important role in robotic paradigms. A wireless communication link allows the robot to send sensor data to the operator and the operator to send commands to the robot when the signal is strong. Operator control unit allow operator to see view from robot sensors and issue commands. Sensor is a device that measures some physical attribute of the world. Proprioceptive sensors sense the position, speed of the humanoids body and joints. Humanoid robots use accelerometers to measure acceleration from which velocity can be calculated. To maintain dynamic balance during walking, a robot needs information about contact force and its current and desired motion. Force sensors placed in robot’s hands and feet to measure contact force with environment position sensors, that indicate actual position the robot.
Opening the humanoid
LIDAR is a sensing technology that measures distance by illuminating a target with a laser and analysing the reflected light. Hydraulic actuators power the limbs. Hands of three types allow Atlas to pick up and manipulate a variety of items. 30 joints feature closed loop position and force control. Wireless-e-stop allows for safe operation of the robot by enabling the operator to shut it down with the press of a button. Ankles have two degrees of freedom, allowing the feet to move up and down and side to side.
Wireless Antennas enable transmission of sensor data and commands between the robot and operator. Protective cage shields fragile sensors from damage due to falls and environmental hazards. Stereo cameras have two or more lenses which enable binocular depth perception.
An on board battery powers the robot for a limited time. Low-set-arms provide a wide range of motion. Modular wrists allow attaching different hands or tools and an added degree of freedom allows for wrist rotation.
The robot was redesigned, with the goal of improving power efficiency to better support battery operation. Atlas can now jump across the gaps, jump and spin 180 degree and most impressive part is it can backflip, even using `its arms to balance after landing just like a real gymnast. Atlas robot designed to operate on rough terrain. The controller uses inertial, kinematic and load data from sensors.
Sensors and camera construct high-resolution 3-D maps for navigation near Atlas robot’s head. Port of power and communication tether which will eventually be replaced by an on-board power source.
Wrists of Atlas robot is designed to operate with hands made by another manufacturer.
| Size | Interface Required | Power |
| Weight:180 lbs( 82kg) | C++ and ROS APls | 480V 3-phase at 15Kw |
| Height: 5’9”(1.75m) | 10 Gbps Fiber OPTIC Ethernet | |
| Chest Depth: 22” (0.56m) | ||
| Shoulder Width: 30” (0.76m) |
So, why is Atlas different?
The first generation could navigate indoors and outdoors, but the new one is much more athletic. Atlas can now balance while performing tasks allowing it to work in a large volume while occupying a smaller footprint. Atlas is unlike other bipedal robots which seem clumsy and unable to even walk. Humanoids aren’t supposed to be able to do this, it’s extremely difficult to make a bipedal robot that can move effectively, Atlas have to balance a bulky upper body on just two legs. Other bipeds like a Cassie robot which walks more like a bird than human, so there may be situations where you want to deploy a robot that works like a human. Atlas has capabilities to walk like human. Atlas uses balance and whole-body skills to achieve two handed mobile manipulation. Atlas keeps its balance when pushed and can get up if it tips over. There are many robots like Wildcat robot uses a galloping gait much like a dog or horse and leans into turns to maintain traction and balance. Bigdog robot has four legs designed like an animal with complaint element to absorb shock and recycle energy from one step to the next. Spotmini is another robot with four legs.
A new version of Atlas, designed to operate outdoors and inside buildings. It is electrically powered and hydraulically actuated. It uses sensors in its body and legs to balance and LIDAR and stereo sensors in its head to avoid obstacles, assess the terrain, help with navigation and manipulate objects, even when the objects are being moved. Atlas height is 5’9” (1.75m) and weight is 180lbs(82kg), the new Atlas is much shorter and lighter than the previous model, which was 6’2” (1.9m) and 345lbs (156kg). Weight of Atlas is more than other humanoid robot like Asimo, Poppy, Romeo.
Task the robot must complete
- Drive utility vehicle.
- Travel dismounted through various terrains.
- Remove debris blocking doorway.
- Open doors, enter building.
- Climb ship’s ladder/stairs.
- Break through wall.
- Locate and close valve.
- Connect firehose.
Can the future breath safe?
The goal is to create robots that can respond to dangerous emergencies. Future of this robot is for it to do anything that a human can’t, and to keep humans safe. The future of Atlas robot is about saving human lives. It could drive vehicle, open doors, explore where human could not and turn valves. Hospital usage involves heavy lifting, precision required actions, dealing with patients infected with deadly diseases. Sending Atlas into a collapsing
building to search for survivors after a terrorist attack instead of risking human lives. Having Atlas work on containing disasters dealing with infrastructure such as problems with a nuclear power plant instead of risking human lives with radiation.