“Now control artificial hands using your mind power. Imagine operating hundreds of such artificial body parts with your thoughts. Isn’t it amazing?“
“Now control artificial hands using your mind power. Imagine operating hundreds of such artificial body parts with your thoughts. Isn’t it amazing?“
At times during multitasking, you would have wished to have more than two hands attached to your body, which you can control using your mind just like you control your natural hands. But considering it as unrealistic and only belonging to sci-fi movies, you would have immediately dismissed the idea. What if I tell you that such a machine can ACTUALLY be built in reality. With the help of brain waves, you can control any such prosthetic or robotic hands. By adding pneumatic actuators, you can even provide extra power to lift heavy loads without pushing any buttons. All you need is brainpower.
Thanks to AI, the possibilities don’t end here. You can apply it in various other dimensions and explore further. All this sounds so cool. You will be eager to know more. So without further ado, let’s begin the awesome journey of building this project by collecting the following materials.

Bill Of Material
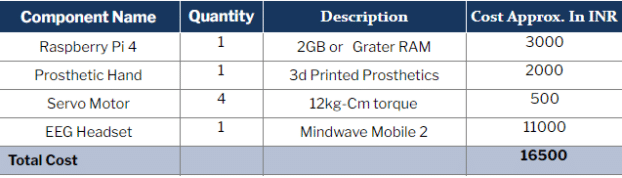
Optional :- Voice bonnet to direct servo connection and control.
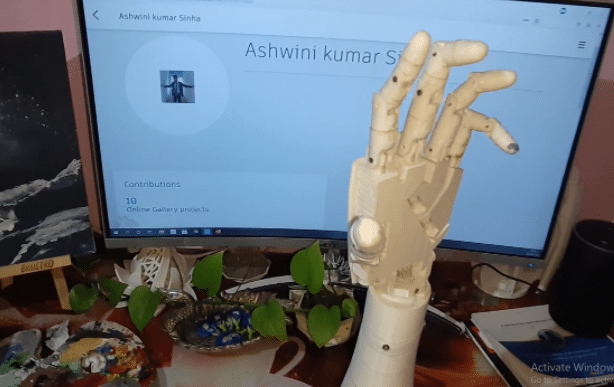
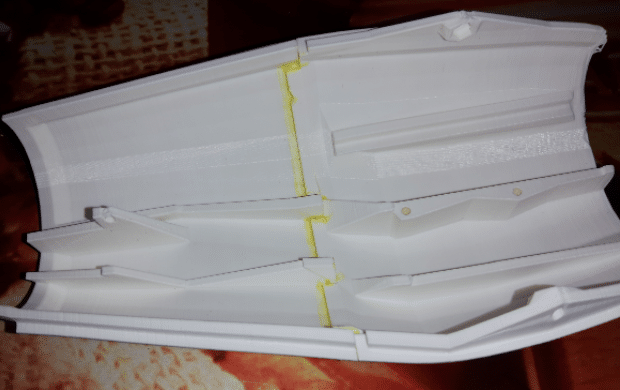
Assembly of Prosthetic Hand
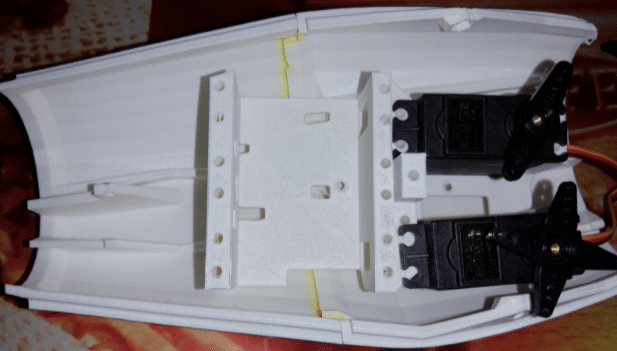
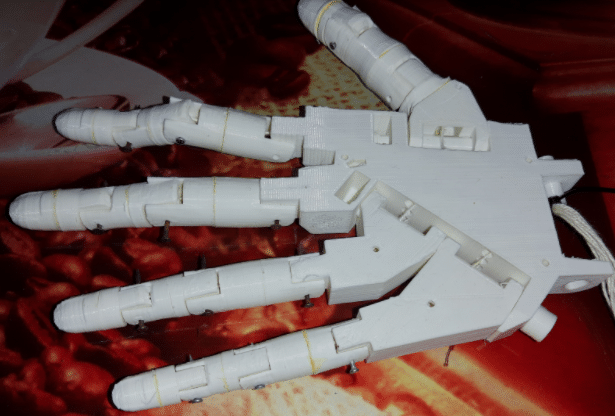
There are various open-source prosthetic body parts available in the market. If you do not want to purchase them, you can 3D print them at home instead. Here, I am using a robotic arm made by InMoov. The complete prosthetic/robotic hand after assembling the required parts including servo motors and fingers looks as shown below.

Prerequisite
To read the mind waves, an EEG sensor needs to be connected with the Raspberry Pi. To further process those signals, a Python module is required. Therefore install a NeuroPy library that can connect with the EEG sensor and get the measured value. Since the obtained data also has to be streamed over Bluetooth, therefore you need the pyserial library that will enable the connection of the EEG data over the Bluetooth serial port.
To move the servo motors, the gpiozero library needs to be installed with which you can control the GPIO pins. So to install this and the above mentioned Python modules, open the Linux terminal and run the following commands.
sudo pip3 install NeuroPy sudo pip3 install pyserial sudo pip3 instal gpiozero
Coding
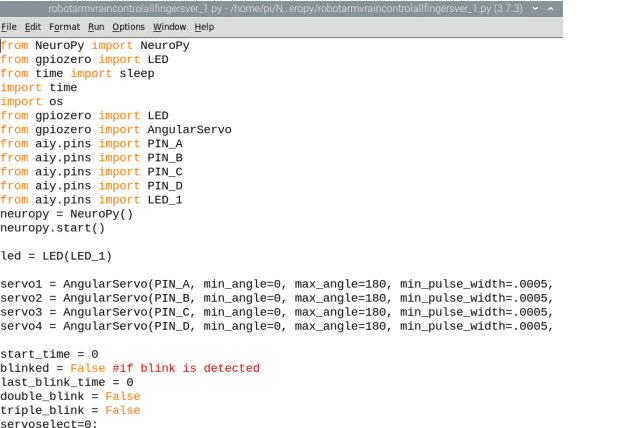
Now you are ready for coding. First import the NeuroPy, pyserial, gpiozero and other libraries into the code. Then define the servo min-max and PWM range values along with the GPIO pin number of the Raspberry Pi to control them.
Next, create variables for storing the servo motor values, which will accordingly control the finger or joints of the robotic arm using brain waves. Therefore start the NeuroPy communication so that your EEG sensor i.e. NeuroSky connects to Bluetooth and establishes communication with the serial port for data streaming.
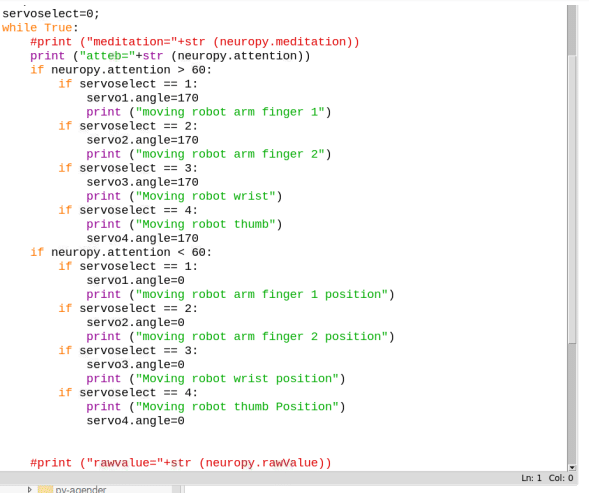
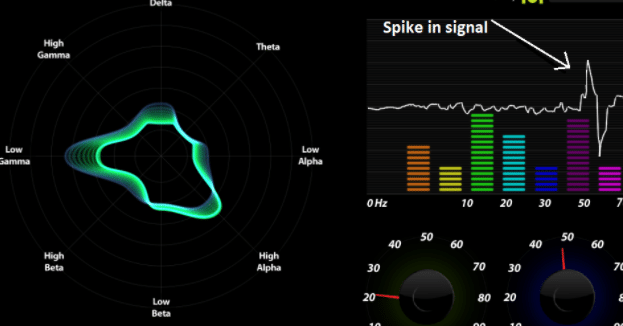
In the next part of the code, create a while loop to obtain the concentration level on a particular thought that is based on data from brain waves such as Alpha, Beta, Theta and Delta.
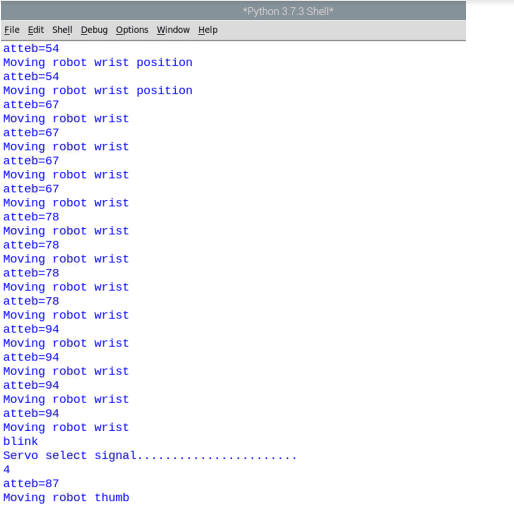
After doing this, create several if conditions for selecting the appropriate servo motor that is attached to various joints on the prosthetic/robotic arm. For example, to move the little finger of the prosthetic/robotic hand with brain signals, concentrate on the servo motor attached to it. When the preset threshold value that is present in the code gets met, the servo motor will move and consequently the little finger. Likewise, the same should happen with the rest of the fingers and the wrist.
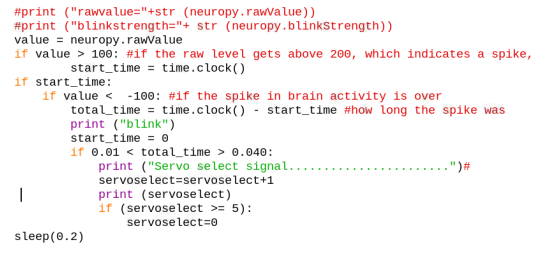
Algorithm for selecting finger movement using brain waves
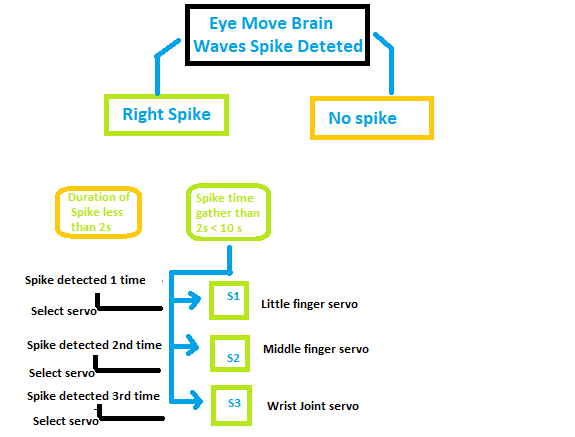
The selection of correct joint movement such as that of a wrist or fingers in a prosthetic/robotic hand using the various brain waves is a bit complicated to understand. So, I have done my best to briefly explain how it works.
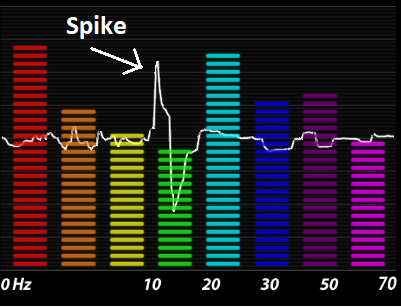
The brain signals generally fluctuate whenever we try to close and open our eyes. These fluctuations result in a spike in the brain signals that fully and properly control the blinking of the eyes. By leveraging this spike, you can select and accordingly move the desired finger joint(s). Suppose you want to move the little finger that is connected with its respective servo motor. To do so, blink once while concentrating your thoughts on moving that finger. To move the second finger, blink twice and concentrate. Similarly, blink according to the finger number you wish to move. To put that into practice, write a piece of code for detecting the appropriate brain wave spike corresponding to each eye movement duration.
Connection
Now connect the servo motor to the Raspberry Pi. If you too (like me) are using an AIY bonnet, then use its PIN_A, PIN_B, PIN_C and PIN_D to connect the servo motors for joints. Make sure to use the bonnet’s power pins to connect with the Raspberry Pi’s power and GND pins that will supply current to the servo motors. However, if you don’t have an AIY bonnet, you can make relevant changes in the code and use any of the PWM pins on the Raspberry Pi to power and control the servo motors using an external power supply ranging from 5V to 6V.
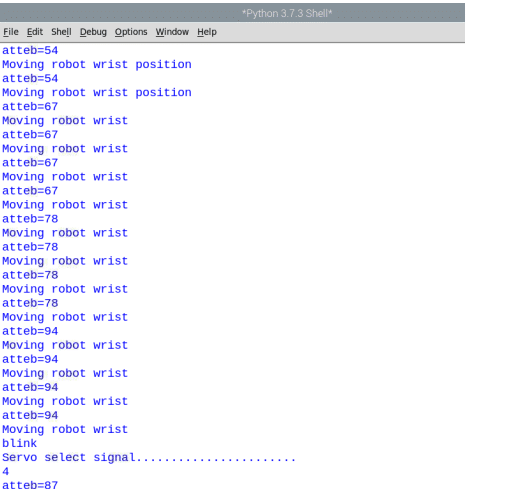
Testing
Connect the MindWave EEG sensor to the Raspberry Pi Bluetooth and then run the code. Now concentrate and think about moving a finger. Ensure to blink the eye as per your chosen finger order and close the eye for 5 to 10 seconds before concentrating on the next finger movement.