




Researchers at the University of Cambridge have designed a hydrogel-based skin that allows robots to mimic the human sense of touch and detect the tactile properties of objects.
Over the years, roboticists strived to create robots that emulate humans in both looks and abilities. Recent technological progress brought about fresh prospects for human-like robots, such as using improved sensors and soft artificial skins.

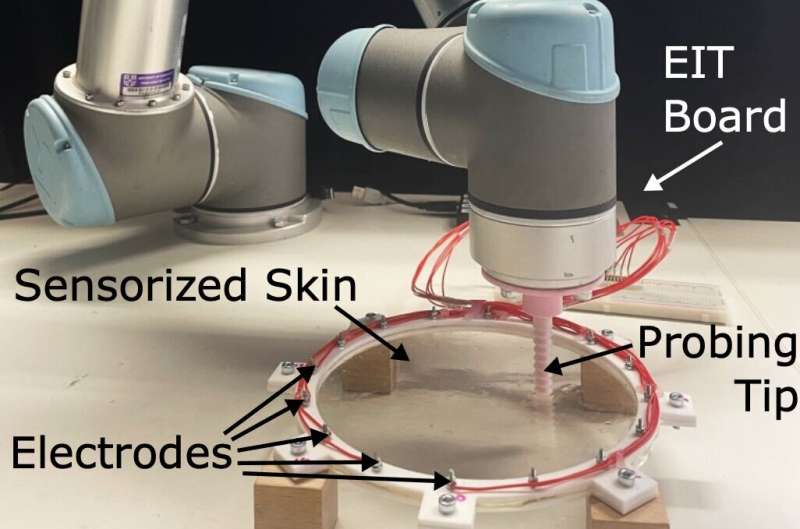
Researchers at the University of Cambridge’s Bio-Inspired Robotics Lab have designed a novel hydrogel-based skin, enabling robots to perceive the tactile characteristics of objects and simulate the human sense of touch. The team created stretchable sensing hydrogel-based artificial skin to detect damage, sense touch and objects, and monitor the environment using an electrode-based hardware system. The researchers’ skin-like material is a sensorized hydrogel that is stretchable, customizable, and biodegradable. They combined this material with Electrical Impedance Tomography (EIT) hardware, which uses edge electrodes to apply currents and measure voltages, allowing the researchers to deduce the state of the skin based on the measured voltages. This enables the researchers to detect touch or damage.
The team does not use a conventional neural network-based architecture to analyze the data collected by electrodes, which is the standard approach for most artificial skins. Instead, they created deformation maps for their hydrogel-based system using a small amount of real-world data. During their initial evaluations, they discovered that their system significantly outperformed an artificial skin system based on conventional neural networks, achieving an average resolution of 12.1 mm over 170 mm circular skin.
Using electrical impedance tomography and functional sensorised skins creates complex problems that are difficult to solve mathematically. By incorporating real-world data, the researchers simplified the process and can now tackle previously unthinkable applications, such as adding tactile sensors to the entire surface of robots. The team evaluated the hydrogel-based skin to detect damage, monitor the environment, and recognise tactile stimuli. The system performed well in all three applications, indicating its potential to enhance soft robotic systems for various tasks.
The researchers believe that they are presently enhancing the shape and size of the skins to detect more complex stimuli. They aim to make the skin capable of sensing not only the location and intensity of touches but also the finger positions and any damage if the skin is applied to a robotic hand.
Reference : David Hardman et al, Tactile perception in hydrogel-based robotic skins using data-driven electrical impedance tomography, Materials Today Electronics (2023). DOI: 10.1016/j.mtelec.2023.100032