



Researchers have developed a system that can autonomously drive the spacecraft across space and around celestial bodies.
Researchers at Georgia Institute of Technology and the NASA Goddard Space Flight Center recently created AstroSLAM, a SLAM-based algorithm that could allow spacecraft to navigate more autonomously. The projected aim was to make future spacecraft destined for deep-space missions (e.g., visiting and surveying asteroids) more autonomous.

Simultaneous localization and mapping (SLAM) is a promising technology that can be used to improve the navigation of autonomous systems, helping them to map their surrounding environment and track other objects within it. So far, it has primarily been applied to terrestrial vehicles and mobile robots, yet it could also potentially be expanded to spacecraft.
The current process requires a large team of human operators on the ground to downlink the images captured from the spacecraft and to analyze them offline to create digital terrain maps, which amounts to carefully choreographing the spacecraft maneuvers. A model that can autonomously reconstruct the shape of nearby asteroids and navigate the spacecraft with minimal intervention from Earth would thus be incredibly valuable, as it could facilitate and potentially speed up deep-space missions.
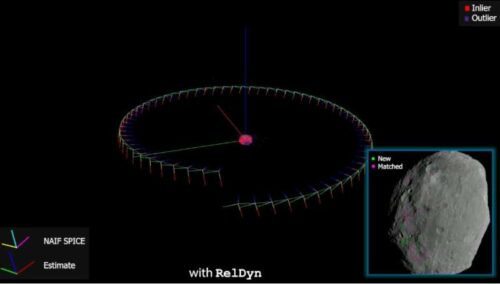
AstroSLAM, the solution developed by Tsiotras and his colleagues, can autonomously generate the location and orientation of spacecraft relative to that of nearby asteroids or other small celestial bodies. It achieves this by analyzing a sequence of images taken from a camera onboard the spacecraft as it is orbiting the celestial body of interest.
It can estimate the relative position and orientation of spacecraft in full autonomy. This information can then be used to plan and execute various maneuvers in orbit, including landing on a nearby celestial body. The model can also generate images of the 3D shape of the nearby celestial body, estimating its size and gravitational parameters.
The researchers evaluated their technology in a series of tests, using real data captured by NASA during legacy space missions and high-fidelity artificial data generated using a spacecraft simulator at Georgia Tech. Their findings were very promising, suggesting that AstroSLAM could eventually enable the autonomous operation of spacecraft in various scenarios.
