


Researchers have designed RobDact, a bionic underwater vehicle that combines computational fluid dynamics and the data extracted from a force measurement experiment.
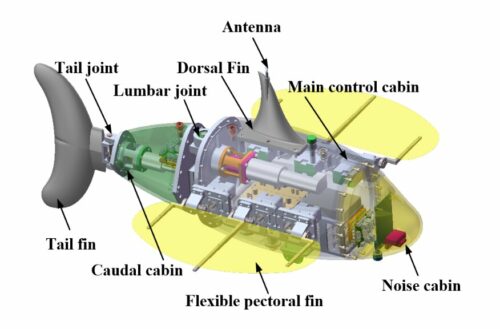
Image Credit: Rui Wang, Institute of Automation, Chinese Academy of Sciences
Underwater robots are now used vastly for researchers and also for other purposes. However, the propellers used in such vehicles are not capable of controlling the movements at slower speed in turbulent waters. They create “twitching” movement in such situations, reducing the robot’s efficiency. Researchers have designed a bionic underwater vehicle to overcome this challenge. RobDact is a hydrodynamic model that can shift according to the environment. The team of researchers has used computational fluid dynamics to create these hydrodynamic underwater robots.

However, the computational fluid dynamics alone does not help with attaining accuracy. Hence the team created a force measurement platform to extract data on the force generated by the RobDact. This platform enables the researchers to obtain both the disturbing force and the force RobDact generates in a complex environment.
“This could help us have a better understanding of the underwater vehicle’s motion state, and control the underwater vehicle more accurately,” said Qiyuan Cao, a researcher at the Institute of Automation, Chinese Academy of Sciences.
The team was able to determine the hydrodynamic force of RobDact at different speeds through the experiment. They measured the force of the RobDact through the force measurement platform they built in the X, Y, and Z directions. They established a mapping relationship between the thrust of the vehicle and the RobDact fluctuation parameters. These data are extracted from the force experiments conducted at different environments. The researchers were able to develop a practical and an accurate hydrodynamic model of RobDact by merging the rigid body dynamic model with the thrust mapping model.
The researchers also intend to study the intelligent control of bionic underwater vehicles in the future. They are intending on combining the hydrodynamic model along with AI methods like reinforcement learning for further studies.
