



A team of researchers at the Max Planck Institute for Intelligent Systems developed a tiny actuated gearbox that is utilized to power tiny robots
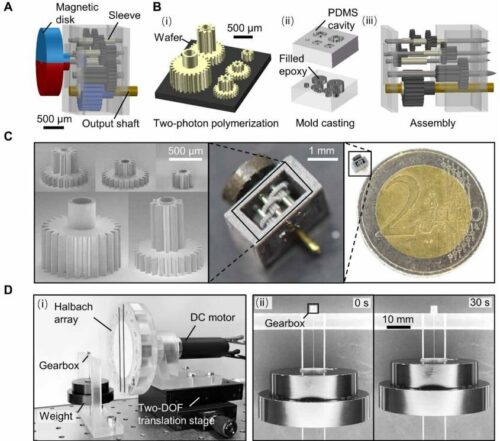
Researchers invented a gearbox that has a magnet on its end to harness the power in a magnetic field through the gears in the box. The gearbox utilizes significant features such as elastic components and mechanical linkages to enhance the power of a robot. The combination of elastic components and mechanical linkages provides spring-like energy that can generate pressure and then release it all at once. The mechanical linkages hold the elastic components in place until it is time to release the energy.

Scientists are striving for years toward the development of tiny robots which can be injected inside the human body to perform medical procedures. Since the robots are very tiny it’s difficult for them to carry their power plant hence, the only option is to use an external magnetic field. The disadvantage of the size of tiny robots is, that it’s very difficult to power them due to very little mass. Finally, the researchers developed a tiny gearbox capable of powering the tiny robots and helping them become stronger.
The researchers used box-like structures with elastic wall parts that were steadily compressed by the gearbox when it was exposed to the magnetic field. Mechanical linkages locked up the wall in place for pressure to build. As the pressure reached to a certain limit, the walls were released pushing the robot in the target direction. Using this approach, the researchers were able to create winch-type robots able to lift to 103 grams or jumpers that reached 119 millimeters. They also created crawlers and clampers.
Click for the Published Research Paper and Video
