



Researchers at Donghua University in China have developed an aesthetic ionic skin using a non-equilibrium growth process for robots to mimic human fingertips.
Our fingertips are not only for touching and gripping objects in the environment but also for sensing their tactile properties and detecting atmospheric changes. They are sensitive and have unique fingerprint patterns. Roboticists aim to create better artificial fingertips for texture recognition and environmental monitoring. Current skin-like materials need to be revised to replicate human tactile abilities.

Researchers at Donghua University in China have developed an ionic skin for robots to mimic human fingertips. The research is inspired by human fingertips, with two key challenges to creating soft ionic skins for tactile abilities: strain interference and texture recognition.
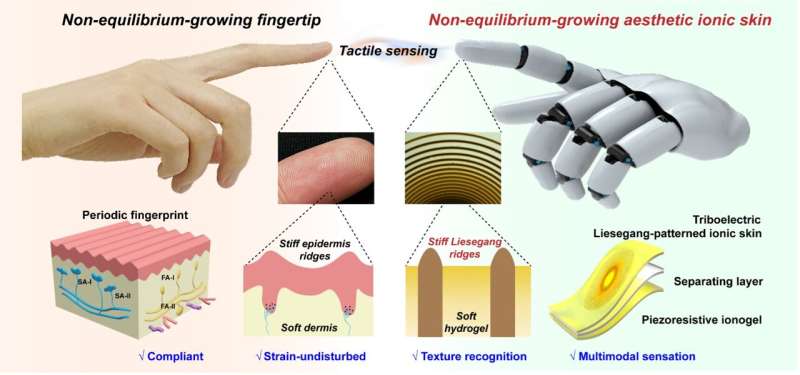
The researchers overcame challenges to create a soft ionic skin with human-like tactile abilities by forming and characterizing fingerprint patterns on soft material. The human fingertips have a modulus-contrast fingerprint structure with periodic ridges and valleys formed by a non-equilibrium reaction-diffusion process from the biochemical Turing effect. Fingertip ridges act as microlevers, rapidly transmitting tactile vibration signals to receptors in the dermis when sensing tactile properties. The ridges barely deform on contact, maintaining constant contact and strain-free pressure sensitivity. The researchers have created an ionic skin inspired by fingertip features using non-equilibrium Liesegang patterning. The team used Liesegang patterning to create an ionic skin with stiff ridges in an elastic hydrogel, mimicking human fingertips.
Liesegang patterning occurs with precipitation and reagent transport, leading to periodic precipitates. Coating the patterned skin with a fluoroelastomer layer creates a sensitive triboelectric tactile sensor. The sensor can detect pressure and recognize textures due to the contrast between soft valleys and rigid ridges. Even when stretched to 50% of human skin’s maximum failure strain, pressure sensitivity remains unchanged. The team combined their ionic skin with a piezoresistive ionogel to mimic a biological tactile sensory system. Preliminary tests showed the resulting sensor sensed tactile information when stretched. The aesthetic ionic skin created with Liesegang patterns has rigid ridges in a soft hydrogel matrix, providing the ionic skin with remarkable tactile sensing features. These include strain-undisturbed pressure sensitivity and texture recognition, which were not commonly found in previous artificial ionic skins.
The team’s hydrogel-based tactile sensor may be used for soft robotics or artificial fingers to detect real-time pressure signals. The research could also inspire the development of other ionic skins for robotics through Liesegang patterning. The researchers believe that the fabricated aesthetic ionic skin has a thickness of about 2 mm, which may not be suitable for future soft robotic applications. To address this, the team plans to introduce Liesegang patterns into an ultra-thin matrix for developing thin-film artificial ionic skins in future studies.
Reference : Haiyan Qiao et al, Non‐equilibrium‐Growing Aesthetic Ionic Skin for Fingertip‐Like Strain‐Undisturbed Tactile Sensation and Texture Recognition, Advanced Materials (2023). DOI: 10.1002/adma.202300593