




The first two parts of this article, covered air defence warfare in great detail. In this part we discuss electronic warfare (EW), under-sea warfare, surface warfare and strike warfare.
Electronic warfare
EW is denying the enemy the advantage of using the electromagnetic spectrum effectively. In detail, the objective is to degrade the performance of the enemy’s communication and detection (radar) systems. This involves two operations, namely, detection and jamming/spoofing.

Detection is carried out through a scheme called electronic support measures (ESMs). This detects the enemy’s radar activity or their communication transmissions.

Jamming/spoofing is carried out through electronic counter measures (ECMs). This degrades the performance of the enemy’s radar activity and their communications. Through ESM, signals—be it radar or communication—are detected. If an imminent attack is indicated, those signals are jammed through ECM.
Both ESM and ECM are integrated into a single module called EW module. Two such separate modules are fitted in the carrier, one on each side. These two are tied up to an EW command console to give an overall scenario of emissions around the carrier. Similarly, a set of EW modules is present in Aegis destroyers and cruisers.
Electronic support measures. There is an interesting and important property of radars. A radar is like a double-edged sword for the user. The ultimate intention of using it is to detect the enemy. How? A radar is like a flashlight used by an imaginary flycatcher to find a fly in a dark auditorium. The flycatcher has to find the fly by waving the flashlight around. There is an effective range for the flashlight within which the fly catcher can find the fly.
But what will happen if the fly is beyond the effective range of the flashlight? The fly can easily find the presence of the flycatcher by seeing the dimly-lit flashlight. The flycatcher cannot find the fly at that distance but the fly can find the presence of the flycatcher. For this, the fly must have sensitive eyes, and that is all.
Similarly, a radar has a range within which it can effectively detect/track the target. Beyond that range, electromagnetic waves do not stop but carry on their travel for a long distance while getting attenuated in due course. So to detect the presence of a radar, a simple high-power radio receiver, very much synonymous to the common radio receiver, tuned to the radar frequency suffices. ESM systems have many radio receivers scanning over different frequencies. If these detect any signal, these stop scanning and fine tune to that particular frequency. Once it is done, direction of that signal can be found out and, further, the type of system that emits it can be detected.
How is it done? Each type of radar has to operate in a certain frequency band to exploit the property of those frequencies. Say, for example, a radar that requires projecting a highly narrow beam with greater resolution requires an X-band frequency. So if the ESM module picks up a particular radar frequency, the type of radar operating could easily be found out. The apparent strength of the signal indicates proximity of that radar.
Assume that the frequency used in the radar seeker of a cruise missile is found out. It is also found out that its strength is gradually increasing. In this case, we can easily say that a cruise missile is on its way for a kill.
‘Know thy enemy’ is a rule in war. So every country tries to know all possible electronic signatures (nature of signals) of its enemy’s radar systems. Signals Intelligence (SIGINT) is a broad name for such operations. Nations do not hesitate to mount specific 007 kind of operations. All ESM systems maintain a library of known electronic signatures. Just by comparing the incoming signature with the library, the ESM module can easily find out the kind of system that is operating.
ESM is not only limited to radars but is used for communications also. Enemy communications will be intercepted by consistently sweep tuning to the entire frequency band. A radio voice communication detected indicates that there is enemy radio activity. The intelligence personnel embedded with the carrier strike group (CSG) decode and translate enemy communications.
The enemy also has ESM facility. So if the CSG has to sneak near enemy shores, it has to maintain radio silence. In that case, the enemy ESM facilities serve the CSG to operate, like a blind man with acute ears.
Electronic counter measures. Denying the enemy the advantage of electromagnetic waves is called an ECM. This includes two approaches, namely, hard kill or jamming, and soft kill or spoofing.
Hard kill/jamming. Jamming is synonymous to shouting loudly so that others cannot converse. If noise is injected in the telephone line, it naturally prevents a speaker from hearing what the other person is saying. Similarly, when a particular frequency has to be jammed, the ECM module generates and broadcasts a powerful signal in that frequency. Known as noise jamming, this prevents the enemy radar from effectively executing its job.
 There are many types of jamming that are carried out. Jamming techniques fall outside the purview of this article. Radio communications can also be effectively jammed apart from radar jamming.
There are many types of jamming that are carried out. Jamming techniques fall outside the purview of this article. Radio communications can also be effectively jammed apart from radar jamming.
Spoofing. This can be done electronically and also by other means. That is, to make the enemy radar see a target where actually there is none and also to make the radar not see the target where it actually is. Electronic spoofing methodologies fall out of the purview of this article.
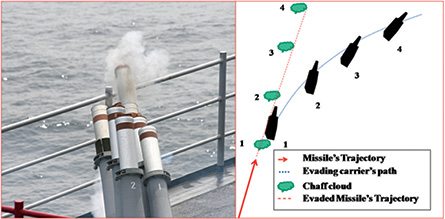
Another effective means of spoofing is through chaff. Tiny, weightless metal foils like the husk of food grains are called chaff. Chaff is dumped in thousands in a shell and fired through mini cannons in the path of the radar of, say, an incoming missile. The shell explodes high up in the air and lets the chaff out. Length of the chaff is half the wavelength of the radar for better signal reflection. Being very thin and light, these foils stay in the air like a cloud and take time to settle down. So in this intervening time, these effectively reflect radar energy.
Simultaneously, the ship rapidly changes its course. The distance and direction of the chaff shell firing is controlled by EW systems. By skilfully firing chaff in the path of the cruise missile, a carrier has a fair chance to mislead the cruise missile to fly away from its course.
Airborne EW systems. Apart from the built-in ESM and ECM systems, the CSG can employ EW aircraft called EA-18 Growlers. These aircraft have a variety of jamming systems and can fly to an area according to the requirement and jam the enemy radar and communication systems.
Typically, when combat aircraft are sent to strike ground targets deep inside enemy territory, the targets are heavily defended by surface-to-air-missile (SAM) systems. It is these EW aircraft that first enter the area and perform jamming to protect the strike aircraft from SAM systems. These aircraft are also capable of gathering signal intelligence by gathering enemy signal samples. Airborne EW systems also work in conjunction with ship-borne EW modules.
Under-sea warfare
A threat for CSG is the presence of an enemy submarine. For a submarine, the prize target is the carrier of the CSG. Submarines use anti-ship cruise missiles for long-range engagement and torpedoes for close-range engagements. Modern-day nuclear submarines can submerge at their will for months together.
For a CSG, the first line of defence against submarines is formed by associated nuclear submarines. These submarines sail far ahead of the CSG and look for enemy submarines. Ocean surfaces are not plain; there are gorges and canyons under the sea. Such oceanographic features are exploited by enemy submarines. Submarines of the CSG look for the enemy submarines at these points. If they find one, then and there it is engaged.



The second line of defence is formed by associated Aegis destroyers. These have both active and passive sonars mounted on their respective hulls. These sonars are called hull-mounted sonars.
An active sonar emits Ping sounds and looks for echoes. Active sonars are complemented by passive sonars. Passive sonars only listen to underwater sound. Unbelievably, sound waves travel enormous distances due to convergence zones in oceans. These zones occur as concentric circles for every 61km from the source of sound. Experienced passive sonar operators can detect even the sound resulting due to a sailor accidentally dropping a tool in the submarine.
When an enemy submarine is detected, the destroyer may engage it with torpedoes for close-range engagement and a missile-torpedo combo for long-range engagement. The latter is a missile with a torpedo as a warhead. If the submarine’s presence is detected at a fairly longer range, this missile takes the torpedo near the target area where the torpedo jettisons itself and dives into the sea. From there the torpedo continues the attack.
Further, to increase the range of submarine detection, onboard under-sea warfare helicopters called Sea Hawks are used by destroyers. More such helicopters are at times housed in the carriers also. These helicopters fly ahead of the CSG in a pattern and try to pin down the submarine. These have special sensors such as forward-looking infrared (FLIR) imaging systems, magnetic anomaly detectors (MADs), dunking sonars and dispensable sonobuoys to detect submarines.
FLIR imaging system. This is a high-power night-vision device used to detect surfaced submarines even in pitch darkness. The system senses the heat emitted by the submarines and is useful only when the enemy submarine has surfaced to get fresh air. In an FLIR, the surfaced submarine will stand out like a black spot on a plain, white paper. But, what happens when the enemy submarine is sailing underwater? There comes MAD.
Magnetic anomaly detector. A submarine is a colossal mass of metal sailing underwater. Magnetic field disturbances are created by the metallic mass’s interaction with the water’s different temperature gradients. MAD picks up these disturbances and detects submarine activity. Then, it transmits the location of the submarine to the destroyer through datalinks.
MADs are only a part of the detection system. Whereas, to pin the exact location of the submarine, helicopter’s dunking sonar and dispensable sonobuoys come into play.
Dunking sonar. The helicopter hovers over the water surface and dunks sonar equipment. After dunking, resulting sonar readings are recorded and transmitted to the destroyer. This, the helicopter does at various locations in the sea. In the destroyer, readings from sonars are processed in underwater warfare command-and-control (C2) systems. This system comes directly under Aegis C2 system of the destroyer. Another method for detecting enemy submarine activity is through dispensable sonobuoys.
Dispensable sonobuoys. The helicopter strategically dispenses these sonobuoys at places where submarine activity is suspected or expected. These sonobuoys separate into two sections as sonar equipment and as a buoy. Sonars emit ultrasonic sound pulses as beeps and receive echoes like whales. Output of each beep is transmitted to the helicopter through buoys.


A sonar computer in the helicopter collects information from various sonobuoys and transmits data to the underwater warfare C2 centre of destroyer. This system creates a picture of the underwater scenario by comparing the received echoes.
Each sonobuoy receives an echo. Depending upon their locations, the echo is received late or early. Through a process called triangulation, exact location of the submarine can be pinned down. Not just one helicopter, but helicopters from other destroyers are pressed into service, depending upon the combat situation. Because once a submarine’s presence is detected, the CSG puts in every helicopter to detect and neutralise that submarine. A fairly clear underwater picture can be evolved by these destroyers.
If the submarine is detected within the range of a helicopter, the under-sea warfare C2 system from the destroyer sends launch commands for a helicopter to launch a helicopter-launched torpedo.
The carrier, which is the prize target for a submarine, ironically, has neither strike capability against submarines nor strong organic submarine-detection capability. It has to defend against the submarine only when the submarine passes through the perimeter created by destroyers. The only defence it has against enemy submarines is through a torpedo decoy to seduce away the torpedoes launched by enemy submarines.
Torpedoes sense the noises chug chugs and murmurs generated by the target’s propellers and engine, respectively. There are certain torpedoes that track the wake created by the ships. The torpedo decoy is towed behind the carrier at a long distance. This decoy has a sonar that only looks for the sound of an approaching torpedo. When it detects an approaching torpedo, it produces a sound mimicking the sound produced by the carrier’s propellers and engine murmurs. The sound is so powerful and realistic that the torpedo is clearly attracted towards the decoy instead of the ship and thus gets spoofed. Employment of this decoy is a worst-case scenario in which associating ships have got sunk by enemy action.
Surface warfare
If a large flotilla of enemy surface ships is spotted faraway by E-2C airborne early warning (AEW) aircraft, F-18 combat aircraft carrying anti-ship missiles may be sent to finish these off. This is the long-range engagement but it is the destroyers that normally take care of medium-range engagements. Aegis C2 system keeps detecting and tracking surface targets. This is done by AN/SPS-67 surface-search radar, AN/SPY-1 radar and AN/SPG-9 radar.
For medium-range engagements, anti-ship missiles called Harpoons are used. These missiles are capable of reaching 100km. For short-range engagements, 12.6cm (5-inch) guns, or, simply, guns, are used to engage in a classical way.
In short-range engagements, the range, bearing and speed of the target are continuously updated and transferred to the gun’s fire control system (FCS). The FCS plots the course of the enemy surface vessel. Then, it calculates the elevation and orientation of the gun to be maintained and actuates the gun, accordingly. It even takes wave motion into account. If the destroyer is heaved one metre up, the shell may land far away from the intended target. So the FCS stabilises the gun accordingly and maintains it in the required orientation.
At the command of the gunner, the FCS fires the gun. This gun can fire in rapid succession since the shells are loaded into the gun through an automatic loader. The destroyer has one such gun and the cruiser has two (one at the front and another at the back).
For medium-range engagements, Aegis system feeds the target coordinates to Harpoon anti-ship missile’s FCS. For targets beyond the radar horizon, the carrier-borne AEW aircraft or even satellites provide the target’s location. These transmit data to the carrier from where it is transferred to the Aegis C2 system and then to Harpoon’s FCS.


Harpoon’s FCS derives the trajectory to be followed by the missile and programmes it into the navigation system of the missile. When fired, Harpoon being a fire-and-forget missile flies itself towards the target and destroys it. Initially, Harpoon uses its navigation system to fly the trajectory entered into its guidance system by its FCS. Upon nearing the target, say, 40km, it uses its radar seeker and finds its intended target.
Tackling asymmetric threats. The general perception of US Naval planners was that elements of a CSG are slightly vulnerable to anti-ship missiles. But sub-surface and surface threats were considered as well covered due to CSG’s superior radar/sonar and offensive capabilities. They expected that such long-, medium- and close-range threats would be neutralised by these capabilities before these would indeed become an actual threat.
But the art of war is not static; it is highly dynamic. New types of threats emerge at any point of time. On October 12, 2000, an American Aegis destroyer called USS Cole felt the brunt of such a new threat. This new threat was suicide boats. USS Cole docked in Aden harbour for refuelling. After some time, a small boat approached the destroyer at high speed. Before anyone knew why it was approaching at such high speed, the boat rammed the ship and exploded. A huge hole was created on the hull and 17 US Navy personnel were killed, almost sinking the ship. Later investigations and analyses showed that the blast was caused by Al Qaeda suicide terrorists.
After the attack on USS Cole, gravity of the emerging scenario was realised. These boats presented themselves as small-size fast-moving targets. Such targets are difficult to shoot down by the 12.6cm (5-inch) guns of Aegis ships. Moreover, technologies are already in place for remotely piloting such boats. So dozens of such boats can simultaneously engage each escorting Aegis ship and damage it. Such attacks are called swarming attacks (like a group of honey bees attacking an animal). It was realised that if such a swarming boat attack is successful, Aegis escorts will probably sink progressively, thus leaving the carrier vulnerable and on its own.
Such boats could only be shot down by manually-fired light cannons (type of heavy machine guns). Normal machine guns fire slugs, whereas, these light cannons fire explosive shells. But with both the ships and fast-moving target boats being heaved by waves, these machine guns were not efficient.
When the ship heaves up/down, the shooter has to tilt the gun downwards/upwards to hit the target. It is difficult to shoot a single target, but it is practically impossible to shoot down a swarm of suicide boats. So a sophisticated weapon system was needed, and that resulted in the development of MK-38 machine gun system (MK-38 MGS).
This weapon system, a computer-controlled system, takes commands from the shooter sitting at a remote console, present somewhere deep inside the ship. For this weapon system, an electro-optical sight (EOS) acts as the eye. This is a video camera that can see even in Stygian darkness. The EOS and the gun are situated on the same mount. Both the gun and the EOS can be trained to an angle simultaneously, and also the EOS can be trained separately. This is done through the remote console that contains a pair of joysticks, one each for the EOS and the gun.
A 30.5cm (12-inch) colour LCD displays real-time imagery from the EOS. Various zoom levels are possible to have a closer look at possible targets (suspicious boats). The EOS computer also generates crosshairs in the LCD screen. These crosshairs are used by the remote operator to aim at the target. The remote operator, with just a flick of a switch, can select from two different types of ammunition depending upon the combat situation.

The EOS also has a stabilisation circuitry. This MGS is physically position-stabilised using motors, which are, in turn, directed by this stabilisation circuitry. This stabilisation circuitry uses semiconductor accelerometers, which provide an output whenever their physical orientation is changed (due to waves). The stabilisation circuitry accordingly directs the motor and keeps the cannon stabilised. When the ship heaves up, this stabilisation helps to keep the gun to face the point at which the crosshairs of the EOS point. The computer present in the EOS checks orientation of the crosshairs of the EOS.
There is a laser range finder present in the EOS that detects the distance of the target. The EOS computer automatically orients the gun, so that when fired, shells land at that point where the crosshairs are pointing. The EOS computer maintains the gun on the required orientation regardless of the ship’s heaving.
This system is expected to be capable of efficiently neutralising suicide boats even before these can approach the ships. It is being progressively fitted in the vessels of US Navy.
Strike warfare
Strike warfare, the only offensive operation and purpose of the CSG, is neutralising land targets deep inside enemy territory. Targets can be airbases, marching troops, rolling tank columns, bunkers, SAM sites, factories, power plants, dams and the like. For neutralising these, the CSG has two options; one is by launching combat aircraft and the other is by firing land-attack cruise missiles.
Tomahawk land attack missiles (TLAMs). When a requirement to strike a target arises, possibilities are assessed. If the target is a single target, say, a command bunker, situated deep inland, it will be well defended by enemy SAM systems all the way from the shoreline. A single-strike aircraft cannot be sent to engage the target situated deep inside enemy territory.
Enemy would also have combat aircraft nearby. The strike aircraft has to fight both the enemy combat aircraft and enemy SAM systems. So a group of four strike aircraft is launched. These aircraft may need refuelling aircraft and EW aircraft like E/A-18 growler’s support. Even then if the threat level for the strike aircraft is high, TLAMs will come into play. These are complementary to strike aircraft. These are high-precision land-attack cruise missiles capable of hitting one building among other buildings. TLAMs have a range of more than 1000km and are nuclear-capable.
Aegis destroyers and cruisers are armed with TLAMs. The CSG commander issues target details through a strike-warfare commander to the ship that has to launch the missiles, which are fed to the FCS of the TLAM. TLAM’s FCS, in turn, feeds trajectory and target details to the missile’s guidance system.
Theoretically, a CSG can launch as many as 300 TLAMs in minutes but these do not carry that many. TLAMs typically start the strike by taking out enemy air-defence C2 centres. This blunts the enemy’s air-defence architecture. Following these strikes, strike aircraft are launched to take out the targets assigned to these. This is how Operation Desert Storm was conducted against Iraq in the year 1990.
Air operations will be covered in the next part.
