




This decade has witnessed a great deal about drones and its innumerable purposes. Drones are and can be used in various industries, but there is significant growth of drones in the agricultural sector. Now, this vehicle has been introduced to the medical industry, too.
Currently, there is considerable traffic in cities, especially at peak hours. Imagine that a person has a minor heart attack. What would likely happen next? Let us say people around this emergency spot see the situation and immediately call for an ambulance. The ambulance that comes by road takes minimum time to reach the spot where the emergency has occurred. When there is a patient who needs urgent attention of a doctor, there is a chance that the person might not survive till the time the ambulance arrives. Time taken by the ambulance plays a vital role in deciding the fate of the patient. Thus, it is essential to bring about a distinct means that would take saving human lives one step closer.
This is where drones could serve the purpose. A drone is an aerial vehicle that is not driven by a human. It uses motors and propellers for movement. The more the number of motors and propellers, the more thrust it can create. So, the best choice to use is a quadcopter, as the system comprises four brushless direct current motors (BLDC), which are used along with propellers to give them the necessary thrust.

A 2200mAh electrical storage device can power the drone. The drone well-equipped with a patient monitoring system has been designed to fly to an emergency and extract the victim’s real-time health parameters.
The central idea of this is that the doctor sitting in the ambulance, which is still on the way, can see the various results produced by sensors and observe the patient’s condition. Also, once this is done, the doctor can immediately prepare the medical prerequisites that would be required by the patient at the spot of the accident. Moreover, if the condition is critical, the doctor can inform the hospital well in advance so that they can be ready to give immediate medical attention. This not only serves as an excellent medi-aid for the patient but can also result in saving his or her life.
Quadcopter fabrication and design approach
Fabrication of the quadcopter went through a sequence of steps. First, four aluminium rods were cut. Then, the hub was cut, and holes were drilled on aluminium rods, which were measured according to the need of the propeller base. Then, the hub and aluminium rails were integrated to form an x-like structure for the quadcopter frame.
The next step was to incorporate four BLDC motors on each of the rails and then integrate four electronic speed controllers (ESCs) on each rail, and connect the common positive and negative terminals of the four ESCs to the respective positive and negative terminals of the battery.
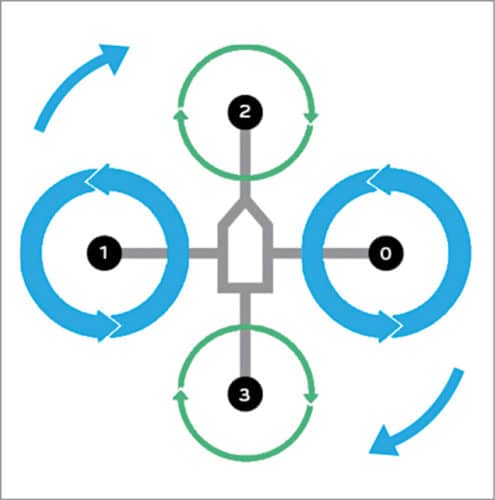
After this, propellers were incorporated to the motors with the aim to move two diagonally-opposite propellers in clockwise direction and the remaining two in anti-clockwise direction. This marked the end of the quadcopter fabrication. A six-channel IR remote was used to fly the drone.
Incorporating the medbox. The medbox comprises other internal circuitry such as Arduino Uno, ECG sensor, heartbeat sensor, thermistor and other medical requirements like some tablets. It also contains a user manual through which a person can observe and help the patient in need. Architecture of the quadcopter is shown in Fig. 1. Power is distributed via power distribution board among the flight controller, sensors as well as the four ESCs. The four ESCs drive each of the four motors.

Workflow
Consider a situation in which a person suffers from a sudden cardiac arrest. When the hospital is informed of this incident, an ambulance is immediately sent to the emergency spot. Simultaneously, the drone team is also notified. The drone is then sent off to the target location. It is well-equipped with the medbox, which consists of various sensors and the first aid kit.
Measured real-time health parameters of the patient are transmitted via ZigBee to the ambulance. These parameters can be observed and analysed in LabView software. Once the ambulance reaches the emergency spot, the drone is sent back to the hospital and is reloaded for the next operation.

Quadcopter specifications
A quadcopter, multirotor, drone or quadrotor is a simple flying mechanical vehicle that has four arms, and in each arm, there is a motor attached to a propeller. Each rotor produces both a thrust and torque about its centre of rotation, as well as a drag force opposite to the vehicle’s direction of flight. Similar to other flying objects, a quadcopter has a group of forces and torques acting on it while it flies. There are four main forces acting on the drone: drag, lift, weight and thrust. For the drone to fly, these different forces need to be balanced.
Given below are some common motion controls for a quadcopter:
Throttle
Throttle adjusts the altitude, or height, of the quadcopter. A quadrotor hovers or adjusts its altitude by applying equal thrust to all four rotors. On most quadcopters, throttle is done by pushing the left stick up (to go up) or down (to go down).
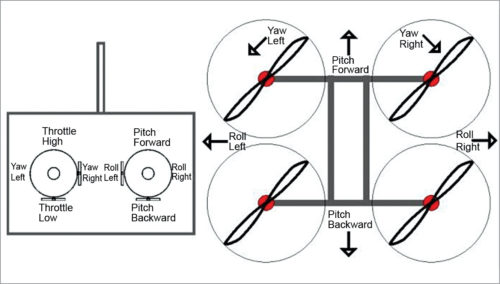
Yaw
Yaw is the rotation of the head of the quadcopter, either right or left. It helps with changing directions while flying. A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction. On most quadcopters, yaw is controlled by pushing the left stick to the left (to turn left) or to the right (to turn right).
Pitch and roll
Pitch is the movement of the quadcopter, either forward or backward. Roll is the movement of the quadcopter side-to-side, either left or right.
A quadrotor adjusts its pitch or roll by applying more thrust to one rotor and less thrust to its diametrically opposite rotor.
On most quadcopters, roll is controlled by pushing the right stick on the transmitter to the left (to roll to the left) or to the right (to roll to the right). And on most quadcopters, pitch is controlled by pushing the right stick on the transmitter up (to move forwards) or down (to move backwards).

The drone ambulance helps in assisting ambulances, which help in saving human lives. The drone travels through air and thus faces no traffic. In this project, three different paths were considered. Observation proved that the drone was able to reach the spot early.
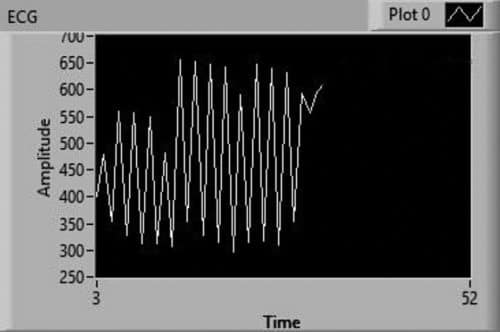
Real-time health parameters of the patient that are transmitted by ZigBee and observed in LabVIEW software, those results and graphs are presented in Figs 6, 7 and 8. Results include measured data of such sensors as ECG, temperature and heartbeat.
• ECG sensor data: ECG electrodes were attached to the left and right arms and the right leg of the patient. Electrodes convert heartbeat to electrical signal and, thus, ECG sensors can measure continuous heartbeat and give heart rate data. Measured data was sent through ZigBee to the ambulance and data was observed in LabView. This data shows the condition of the heart, that is, rate of the heart. Analogue value of the heart rate can be seen on the LCD display screen.
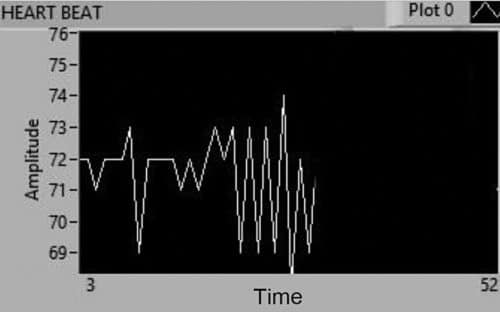
• Heartbeat data: Pulse rate or heartbeat sensor measures the heartbeat of the patient. Data was sent through ZigBee to the ambulance. Observed data in LabView is shown in Fig. 7. The graph shows heartbeat measurement as 72. Heartbeat in the shown graph varies from 69 to 72. Data can also be seen on the LCD display screen in the medbox.
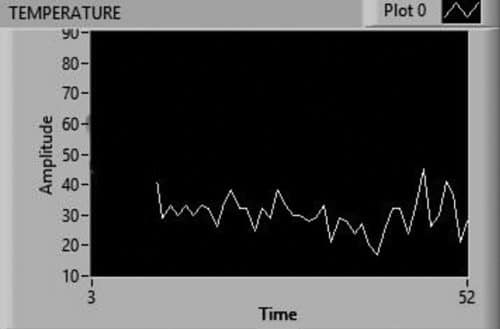
• Temperature data: The thermistor measures temperature of the sensor, and data was transmitted through ZigBee to the ambulance. Data thus observed in LabView is shown in Fig. 8. Temperature shown measures approximately 30°C. Atmospheric conditions and other factors might cause some variation in data, but data shown on the LCD can also be used to estimate this value.
These results represent data of the patient, and this data can be sent to the ambulance where it can be analysed by the doctor so that he or she can evaluate the situation better and take other pre-medication choices.
Data taken essentially proves beneficial for the patient and, hence, the purpose of the drone ambulance, which is to assist ambulances in saving human lives.
The future
Significantly further headways should be possible. Automation can be made self-ruling. GPS module can be utilised to obtain area of the objective, and machine learning can be utilised to assist with automation by calculating the briefest way to achieve the goal.
A camera can be actualised in automation with the goal that present circumstances can be seen by the specialist in the emergency vehicle. A significantly heartier automation can be created for completing this particular task.
Shivang Shastri is BTech in ECE. His interests include multidisciplinary projects, VLSI and digital electronics
Vangara Vamsi Krishna is BTech in ECE. His interests also include multidisciplinary domain, VLSI and digital electronics

