




Researchers at the University of Bonn have created BonnBot-I, a robotic system that could help farmers manage weeds and monitor crops more efficiently.
In the last decade, robots have transformed many areas, including farming, by potentially automating tasks and enhancing efficiency. This has reduced the workload for farmers, especially in weed management and crop monitoring. With a rising demand for organic food with fewer chemicals, farmers are now looking for cleaner ways to control weeds, remove pests, and monitor crops.

Researchers at the University of Bonn have developed a robotic system called BonnBot-I that may aid farmers in more efficiently managing weeds and monitoring crops.
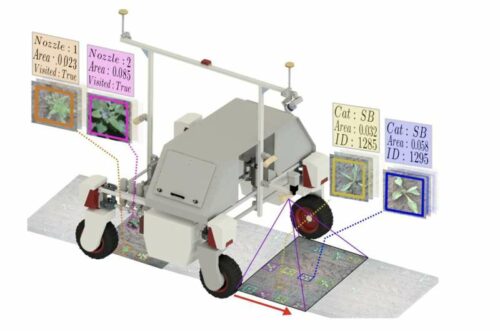
The robot developed by the research team has used localization sensors, including Global Positioning System (GPS) technology and odometry, allowing it to move through fields to locate, classify, and count plants and manage weeds using various tools integrated into its body structure. Notably, the system is fully compatible with the Robot Operating System (ROS), the primary robotic operating system. The team have also assembled a new dataset for training algorithms to identify and count corn, a crop that can be challenging to detect with computer vision.
Driven by crop monitoring techniques that can precisely locate and classify plants, the researchers enhanced their performance by integrating the platform’s available GNSS and wheel odometry. The enhancements have reduced the tracking accuracy error of the crop monitoring approach from a normalized average error of 8.3% to 3.5%, evaluated on a new publicly accessible corn dataset. The team have introduced a unique setup of weeding tools mounted on linear actuators, tested in simulated settings.

The researchers have tested the BonnBot-I robot in simulated fields replicating real crop distribution, and the initial results are promising. The findings suggest that the robot could be a valuable tool for farmers. In the future, the team might conduct additional tests in real-world environments with a physical prototype of BonnBot-I to further assess its capabilities.
References: Alireza Ahmadi et al, BonnBot-I: A Precise Weed Management and Crop Monitoring Platform, arXiv (2023). DOI: 10.48550/arxiv.2307.12588
Alireza Ahmadi et al, BonnBot-I: A Precise Weed Management and Crop Monitoring Platform, 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2022). DOI: 10.1109/IROS47612.2022.9981304
