




Peking University and China Agricultural University researchers have recently examined the effects of coexisting live fish and robotic fish.
Engineers have recently developed animal-inspired robotic systems, such as four-legged robots, snakes, insects, squid, and fish. However, studies on the interactions between these robots and their biological counterparts are still limited.

Researchers at Peking University and China Agricultural University have recently studied the impact of placing live fish in the same environment as a robotic fish. During field experiments, live fish were observed following the robotic swimming fish, prompting researchers to study the underlying principles of this behavior. The team investigates fish-robot interaction to benefit robotics and biology research. Their koi-inspired robot replicated the fish’s appearance and movements for the experiments.
Based on the central pattern generator (CPG) model, the control system generates rhythm signals for the oscillations of our two-jointed system. These signals drive the caudal fin to produce an anti-Karman vortex street and achieve a body-caudal fin (BCF) motion like koi fish. This design allows the robotic fish to swim efficiently and study fish behavior. The team placed their koi fish-like robot prototypes in a tank with live fish and observed their behavior, examining the effects of the number of live fish in the tank.
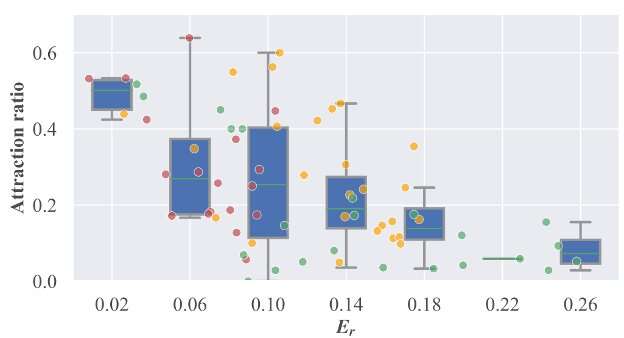
According to the researchers, the most significant accomplishment of the study was the analysis of experiments on quantity and parameter variation. The extensive experimentation revealed that live fish have notably lower proactivity when alone, while the most proactive scenario is when a robotic fish interacts with two live fish. The experiments on parameter variation also indicated that live fish might respond more proactively to robotic fish with high frequency and low amplitude, or they may move together with the robotic fish at high frequency and high amplitude.
The researchers’ findings could inspire the design of more fish-like robots and prompt further studies on animal-robot interactions. This could provide insights into the social behavior of animals and their response to robots in their natural habitats. The researchers believe that flexible materials like dielectric elastomers are a promising avenue for improving robotic fish by creating silent and vibration-free propulsion technology.
Reference : Ziye Zhou et al, Proactivity of fish and leadership of self-propelled robotic fish during interaction, Bioinspiration & Biomimetics (2023). DOI: 10.1088/1748-3190/acce87