



Discover how this innovation is set to transform rehabilitation treatments for the elderly and patients recovering from strokes or trauma.
An electromyography (EMG) sensor technology has recently captured the spotlight for its ability to provide long-term stable control of wearable robots, impervious to the wearer’s sweat and dead skin. Wearable robots have become essential devices for various rehabilitation treatments targeting the elderly and patients recovering from strokes or trauma. A collaborative research effort, spearheaded by Professor Jae-Woong Jung from the KAIST School of Electrical Engineering (EE) and Professor Jung Kim from the KAIST Department of Mechanical Engineering (ME), has culminated in the successful creation of a stretchable and adhesive microneedle sensor capable of robustly sensing physiological signals, irrespective of the user’s skin condition.

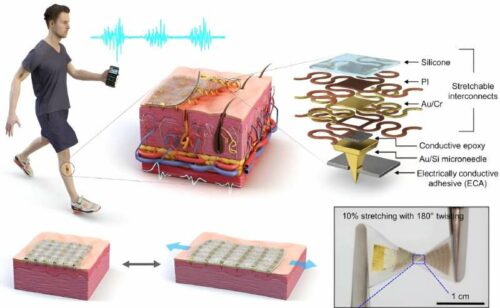
Wearable robots, integral to rehabilitation treatments, necessitate precise EMG measurements to comprehend human movement intentions. Conventional sensors suffer from signal degradation over time and sensitivity to skin conditions, impeding reliable, long-term control of wearable robots. The latest technology offers a solution by using a stretchable and adhesive conducting substrate combined with microneedle arrays that can comfortably penetrate the stratum corneum, thereby ensuring sustained, high-quality EMG measurements. This sensor, with its outstanding performance, is poised to provide stable control of wearable robots over extended periods, regardless of fluctuating skin conditions, and eliminates the need for preparatory measures to cleanse sweat and dead cells from the skin’s surface. The research team engineered a stretchable and adhesive microneedle sensor by incorporating microneedles into a soft silicon polymer substrate.
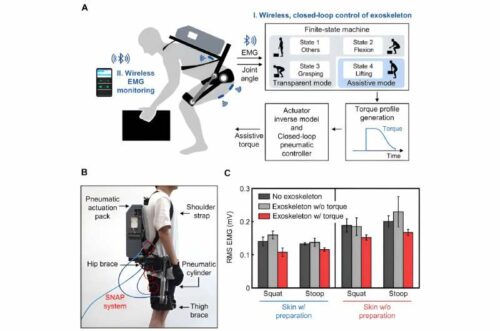
These flexible microneedles penetrate the stratum corneum, characterized by high electrical resistance, efficiently reducing contact resistance and delivering high-quality electrophysiological signals, even in the presence of contaminants. Additionally, the soft and adhesive conducting substrate conforms to the skin’s surface and stretches with the user’s movements, ensuring a comfortable fit and minimizing motion-induced noise. To validate the utility of this patch, the research team conducted a motion assistance experiment using a wearable robot. The microneedle patch was affixed to the user’s leg, where it detected electrical signals generated by the muscles. Subsequently, the sensor transmitted these intentions to the wearable robot, enabling it to assist the user in lifting heavy objects with ease. The team mentioned that the developed stretchable and adhesive microneedle sensor can reliably detect EMG signals regardless of the user’s skin condition. This will enable precise and stable control of wearable robots, facilitating the rehabilitation of robot-assisted patients.
