


PULSAR enhances Unmanned Aerial Vehicles (UAVs) technology with onboard perception, mapping, and control using micro-computer and LiDAR sensors, indoors or outdoors, independently.
Unmanned Aerial Vehicles (UAVs) have become increasingly indispensable in search and rescue operations, cave surveys, and architectural mapping. However, balancing visionary concepts with practicality requires innovative thinking and robust engineering solutions to bring UAVs to life.
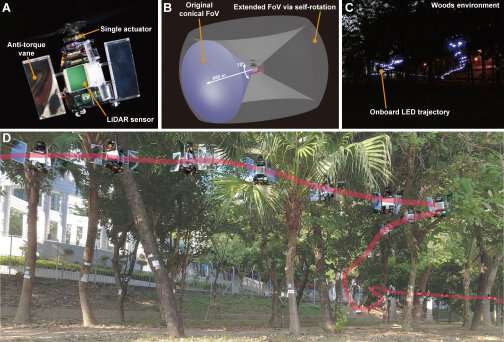
Researchers at the University of Hong Kong (HKU) have introduced PULSAR, a Powered-flying Ultra-underactuated LiDAR-Sensing Aerial Robot. PULSAR, named after the astronomical pulsar, elevates UAV technology. It has onboard perception, mapping, planning, and control using micro-computer and LiDAR sensors, indoors or outdoors, without external instruments.
PULSAR’s functionality stems from a single actuator, enabling swashplateless mechanism, thrust, and moment. The team showcased its real-time obstacle detection, trajectory tracking, and autonomous navigation in darkness through experiments. PULSAR remains stable in unpredictable conditions, enduring external wind disturbances. It maintains hover within a small area at a maximum wind speed of 4.5 m/s, ensuring safer and more stable flights even in wild environments. Additionally, the sensor can widen the view by rotating itself, boosting UAV’s perception and efficiency. Two power-intensive methods are currently used to extend the sensor’s field of view.
The first method uses wide-angle sensors like fisheye, catadioptric cameras, or 360° LiDAR, causing distortions. However, the 360° LiDAR has a limited vertical field of view and resolution. The second method employs multiple sensors (multi-camera or multi-LiDAR), increasing costs and data processing time. PULSAR reduces energy consumption by 26.7% compared to a similar quadrotor UAV while maintaining agility. Its single-actuator propulsion system minimizes energy loss, achieving a high flight efficiency of 6.65g/W. Despite its compact dimensions, this UAV achieved a hover time of over 12 minutes. By removing the LiDAR sensor and upgrading the propeller and battery, PULSAR’s hover time can be extended to over 40 minutes.
The researchers believe that their research platform enables the exploration of self-rotating UAVs, aiding the study of control methods and simultaneous localization and mapping (SLAM) techniques during high-speed rotation and aggressive motion.
Reference : Nan Chen et al, A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation, Science Robotics (2023). DOI: 10.1126/scirobotics.ade4538