


Researchers aimed to enhance a SoftHand-based robot by adding TacTip sensors to the fingertips to attain human-like dexterity and manipulation abilities.
The ability for robots to work alongside humans on manual tasks has become increasingly important. One crucial aspect of this collaboration is the robot’s capability to grasp and manipulate various objects without causing any damage or dropping them.

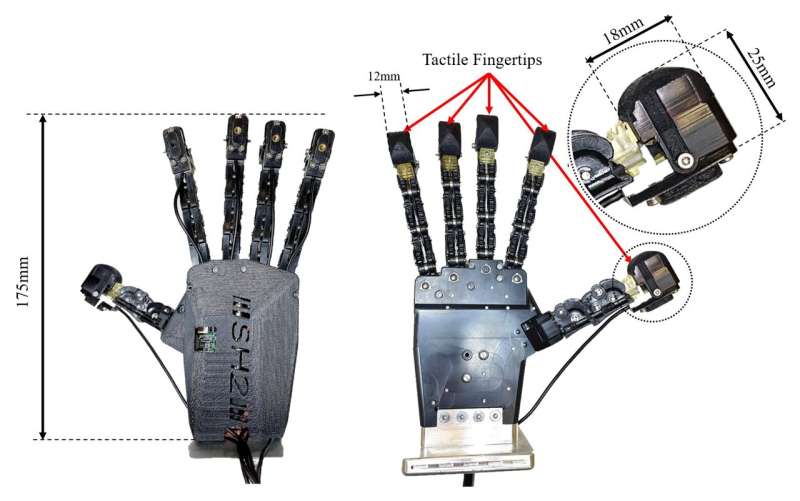
Researchers at the Bristol Robotics Laboratory’s Dexterous Robotics group, Pisa University and Indian Institute of Technology have developed a tactile-based system that could enable robots to handle a diverse range of objects with greater efficiency and gentleness. The SoftHand, a robot hand designed by researchers at Pisa University and Indian Institute of Technology with a human-like structure, has been integrated with the BRL TacTip tactile sensor, as both biomimetic technologies complement each other. SoftHand, a prosthetic tool, mimics human hands’ form and function, enabling similar grasping with postural synergy. Researchers integrated TacTip sensors to extract information from 3D-printed tactile skin onto SoftHand fingertips for their study.
Integrating sensors to SoftHand-based Robots
The aim was to enhance the SoftHand-based system introduced earlier by integrating TacTip sensors on its fingertips and using an advanced control framework to achieve gentle, force-sensitive, and human-like grasping. The newly developed controller measures soft tactile skin deformation on SoftHand fingertips to adjust grasping force via feedback signals. Unlike traditional grasp control methods like motor current, adjusting SoftHand’s grasping force via feedback signals is more accurate due to its soft structure. The controller utilizes feedback from 5 high-resolution optical tactile sensors, which capture a large amount of tactile information by monitoring changes in the tactile skin using a camera. With a 1080p resolution, there are over 2 million tactile nodes.
Human-like performance of Robots
To alleviate the computational load, a parallel-processing hardware “brain” was developed to collect images from multiple sensors concurrently. This enhanced their grasp controller’s reaction times, resulting in human-like performances. The results demonstrated that stable, gentle grasping could be achieved for various objects without complex tuning by consolidating complex tactile information from multiple fingertips into a simple feedback signal close to human touch. Adding multiple sensors improved the SoftHand-based robot’s tactile and sensing abilities. The team combined it with their parallel-processing hardware and controller to improve grasping performance without delays.
Researchers believe that a new tactile-driven robotic system has the potential to be integrated into humanoid robots in the future, enabling them to handle delicate or deformable objects while working with humans on various tasks. The system could handle a broader range of grasping and manipulation tasks with further development.
Reference : Christopher J. Ford et al, Tactile-Driven Gentle Grasping for Human-Robot Collaborative Tasks, arXiv (2023). DOI: 10.48550/arxiv.2303.09346