




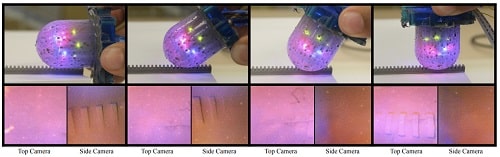
Besides being equipped with high-resolution multi-cameras, the tactile sensor is also multi-directional, which means it has detecting and measuring abilities on its entire surface.
Like all sensors out there, tactile sensors are essential in providing critical data through measurements of physical parameters. These minuscule devices are based on the human sense of touch. Examples are piezoelectric, capacitive and resistive sensors. These are widely used in touchscreens of smartphones and tablet/laptop monitors.
Robots are also equipped with such tactile sensors that allow them to detect different object properties pertaining to hardness or smoothness, recognise the shape of an object and accordingly manipulate its arms to perform an activity like grasping. For an autonomous robot, gauging an object’s softness or hardness is an important factor in deciding where and how hard to grasp them and get a sense of how that will react when moved, stacked or laid on different surfaces.
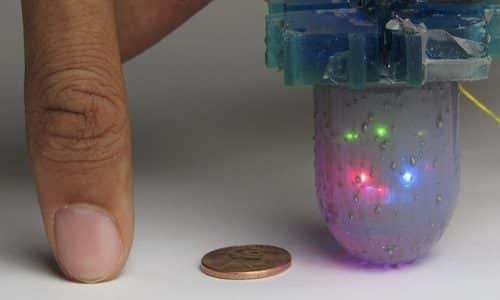
Despite the past improvements made in tactile sensors, some of them still have small sensitive fields or only provide low-resolution signals. So, here’s presenting OmniTact, a multi-directional high-resolution tactile sensor that has been designed to be used as a fingertip for manipulation with robotic hands. Designed by a team of researchers from UC Berkeley, the sensor uses multiple micro-cameras to detect multi-directional deformations of a gel-based skin.
Enhanced version
The OmniTact sensor can be considered to be a modified version of the GelSight, a tactile sensor previously developed by researchers at MIT that had the ability to generate 3D maps of the detected objects and deduce object properties as well. It consisted of a block of transparent rubber whose one side was coated with metallic paint. When the paint-coated side was pressed against an object, it perfectly adapted to the object’s shape.
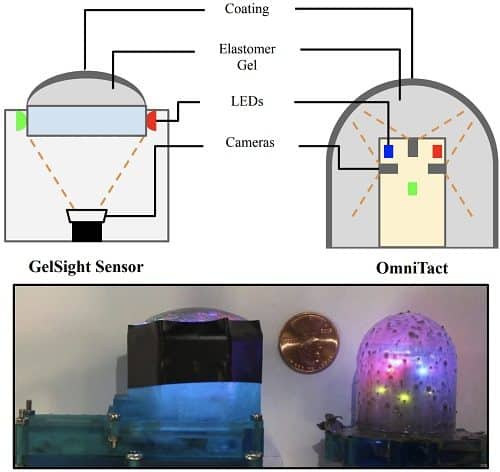
Similarly, the outer sensing layer of OmniTact is made of silicone gel and can capture 3D visuals of an object. But unlike GelSight, OmniTact provides multi-directional data using multi-cameras, provides high-resolution readings (400 x 400 pixels) with the help of state-of-the-art image processing and computer vision techniques.
According to Frederik Ebert, research team member, existing tactile sensors are either flat, have small sensitive fields or only provide low-resolution signals. OmniTact, in addition to providing high-resolution readings, has a finger-like form factor, that allows it to be used for more precise manipulation tasks.
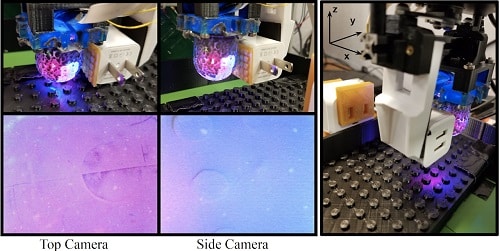
Testing
To demonstrate the viability of their sensor, the research team performed an electrical connector insertion task in which it used a robotic gripper whose one part consisted of the OmniTact sensor. Upon picking up an electrical socket, the robotic hand firmly inserted it into an electrical socket. The result was remarkable. It showed that the sensor was not only capable of executing challenging tasks with ease but can also enable a robot to sense different material and grip them effortlessly.
The team plans to make the sensor cost-effective and add further enhancements for conducting a wider range of tasks that produce highly accurate results.
For more information, read here.

Thank you for sharing these great electronic blogs.
Awesome article on High-Resolution Tactile Sensor For Robotic Sense. I was searching on google & found great info like ‘Enhanced version’ provided OmniTact sensor, really excited to try.