



New kinematic intelligence framework enables different robots to learn and execute identical tasks safely, improving cross-platform adaptability, reducing reprogramming effort, and boosting flexible automation in manufacturing environments.

Researchers in the Learning Algorithms and Systems Laboratory (LASA) at EPFL’s School of Engineering have developed a kinematic intelligence framework that enables multiple robots with different mechanical structures to learn and safely execute the same task, marking a significant step toward flexible and scalable industrial automation. The system addresses a long-standing limitation in robotics where skills programmed for one machine often fail on another due to differences in joint design, range of motion, and physical constraints.

The study, published in Science Robotics, demonstrates how human-demonstrated movements can be converted into generalised motion strategies and then automatically adapted to suit different robot bodies. By classifying each robot’s kinematic limits, the framework ensures that learned tasks remain within safe and feasible operational boundaries while preserving functional accuracy.
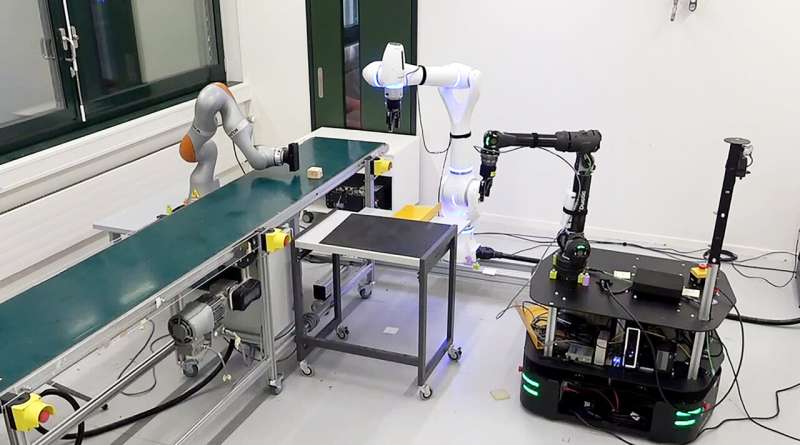
In experimental trials, researchers recorded object-manipulation tasks, such as pushing, placing, and throwing, using motion capture. These demonstrations were then translated into a reusable movement model. Three distinct commercial robots were able to reproduce the same assembly-line sequence, including moving objects across different stations and completing a final placement task, despite having different mechanical configurations.
A key innovation lies in the system’s ability to decouple task knowledge from hardware design. Instead of reprogramming each robot individually, the framework maps a shared “skill representation” to each machine’s physical constraints. This reduces deployment time and enables rapid reconfiguration in dynamic production environments where robots may frequently change or be upgraded.
The researchers highlight that each robot interprets the same learned skill differently, but always operates within defined safety boundaries. This makes the approach particularly useful for human-robot collaboration, where predictable and safe behaviour is essential in shared workspaces.
Beyond manufacturing, the framework could support household robotics and natural-language-based instruction systems, allowing non-experts to assign tasks without requiring technical programming knowledge. It also supports future robotics ecosystems where hardware evolves quickly, ensuring that skills remain transferable across generations of machines.
Overall, kinematic intelligence represents a shift toward more adaptive and interoperable robotic systems, where intelligence is no longer tied to a single machine but shared across diverse robotic platforms.
