



There has not been a better time to supercharge your robots. Meet RobotCore framework, a new open architecture for hardware acceleration in ROS2 to assist you with that. This article describes the powerful capabilities of RobotCore framework and how it can take your robots to the next level
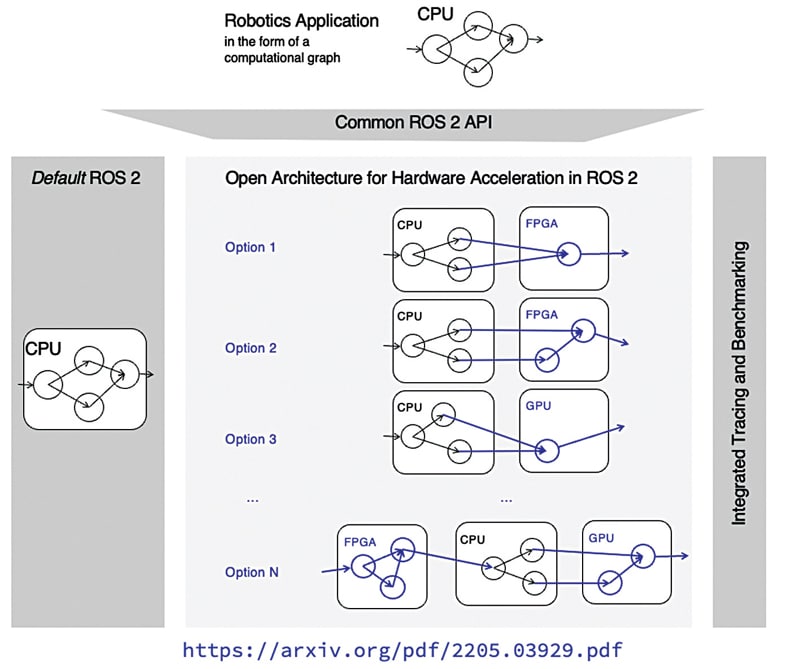
The RobotCore framework helps in leveraging hardware acceleration and building custom compute architectures for robots, or IP cores, which make the robots faster, more deterministic, and/or power efficient. RobotCore is a robot-specific processing unit that helps map Robot Operating System (ROS) computational graphs to its CPUs, GPU, and FPGA efficiently to get the best performance. The RobotCore framework is intended to be a modular and extendable framework.

Before moving forward, let us be clear about hardware acceleration. Hardware acceleration is the process of offloading certain computational task to specialised hardware so that you can perform those tasks more efficiently. For example, let us say you are using a simulation software or playing a game, then you would want graphical processing units (GPUs) in your system that could handle the render with ease.
That is what GPU-enabled hardware acceleration is when it comes to simulation software and games. In the context of robotics, hardware acceleration can help you create faster and more power-efficient robots. This is done through various accelerator platforms.


