


New control framework lets humanoid robots jump, climb and traverse obstacles with human-like agility.
Humanoid robots are learning to perform complex parkour movements, marking a major step toward machines capable of navigating real-world environments with human-level agility.Researchers at Amazon Frontier AI & Robotics (FAR) and University of California Berkeley (UC Berkeley) recently demonstrated a control framework that allows humanoid robots to autonomously traverse obstacle courses by combining perception, motion planning and reinforcement learning.
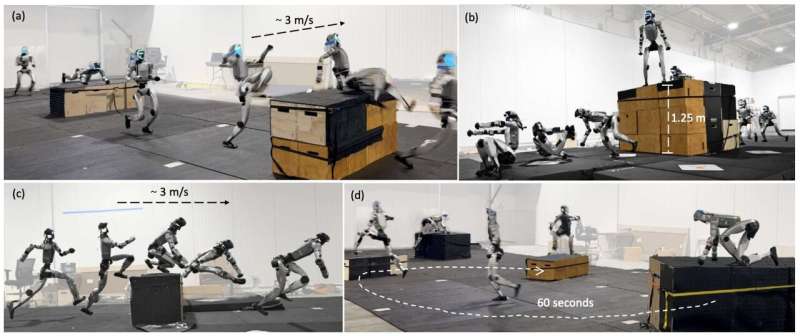
Using onboard sensors and AI-driven control, the robots can climb over barriers, step across gaps and move through multi-obstacle environments while adapting to changes in terrain. The system focuses on enabling robots to chain together multiple dynamic skills—such as stepping, vaulting and climbing—into continuous motion sequences similar to those used by human parkour athletes. Instead of programming each movement individually, the framework selects and combines previously learned motion fragments to generate smooth trajectories in real time.
In experiments, humanoid robots equipped with the system successfully navigated complex courses containing platforms, beams and tall obstacles. One test showed the robot climbing obstacles up to **1.25 meters high—nearly its own height—**while maintaining balance and stability. The robot used depth sensors and real-time decision-making algorithms to determine the best way to approach each obstacle.
A key component of the approach is motion-tracking reinforcement learning. The technique allows robots to learn dynamic movements from human demonstrations and simulated training environments. By combining these learned behaviors with visual perception, the robot can adapt its actions to unpredictable terrain rather than following a fixed script.
Researchers say such capabilities could help humanoid robots operate in environments designed for humans, including disaster zones, industrial facilities and urban infrastructure. Agile locomotion would allow robots to climb debris, navigate stairs and maneuver through tight spaces where wheeled machines struggle.
The work reflects a broader push in robotics to create machines capable of robust, adaptive movement in the physical world. Humanoid robots are increasingly being designed to handle tasks traditionally performed by humans, from industrial work to search-and-rescue operations.
While the technology is still largely experimental, advances in AI-driven control and perception suggest that robots capable of human-like mobility could soon move beyond research labs into real-world deployments.