


This actuator skips motors and still moves in under a second, bending and returning on its own, pointing to new ways to build robotic and space systems.
A smart material-based actuator developed at KAIST operates in less than a second without using a motor, offering a new option for robotics and space structures that need light and repeatable movement. Conventional motor-based systems face limits due to weight and complex structure.

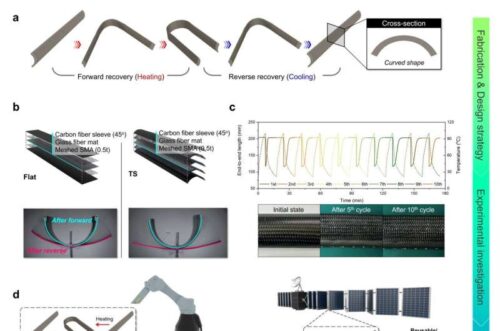
The actuator is based on a two-way shape memory material system capable of reversible self-shape change. The material changes shape when exposed to external stimuli such as heat and returns to its original form without additional mechanical systems.
It combines shape memory alloys (SMA) and shape memory polymers (SMP) to use the strengths of both materials. SMAs are metals that return to their original shape when heated, while SMPs are polymers that respond to heat or other external inputs by changing shape.
Earlier shape memory materials had limits. Some could not return to their original form after deformation, while others showed slow recovery. Differences in stiffness between metals and polymers also reduced accuracy during repeated use.
To address these issues, the team modified both the material and its structure. The SMP composition was adjusted and reinforced with carbon fibers to improve rigidity. A tape spring structure, similar to a retractable measuring tape, was also applied to the actuator.
This structure enables a snap-through effect, where energy stored during deformation is released quickly. This improves both movement speed and accuracy.
The actuator shows full two-way actuation. It bends when heated and returns to a flat state as temperature decreases. It also shows a higher deformation range and close to full recovery to its original shape. The recovery speed is improved, allowing repeated operation without complex control systems.
The study demonstrates two-way deformation, sub-second actuation speed, and accurate deployment in a single system. This marks progress toward practical use of shape memory material-based actuators in applications such as robotic grippers and deployable space structures.

