



A modular robotic hand that crawls, grasps from multiple angles, and operates independently—pointing to new possibilities for electronics-driven automation and compact robotic systems.
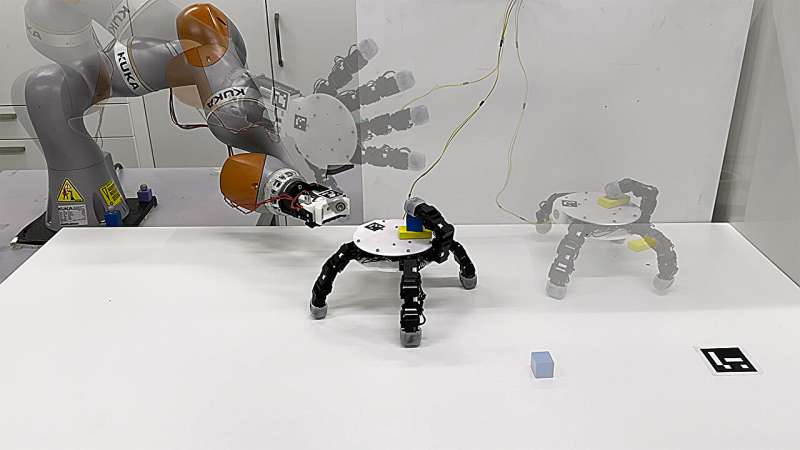
Scientists have unveiled a novel detachable robotic hand capable of independent crawling, multi-directional grasping and sequential object retrieval, a development with clear implications for robotics and electronics integration. At its core, the design abandons the traditional fixed, arm-mounted gripper in favor of a symmetrical, palm-centric module that can detach from its base and move across surfaces on its own “limbs” essentially using its fingers as legs. This mobility allows the hand to access tight or otherwise unreachable spaces, a capability that could be significant for industrial inspection, service robotics and exploratory electronics tasks where confined access is a challenge.

Researchers demonstrated the hand’s multitasking prowess by having it retrieve up to three distinct objects in sequence before reattaching to its mount. The prototype successfully grasped common items from a cardboard tube to a tin can and can replicate 33 human grasp types. It also handles loads up to 2 kg, a noteworthy strength for a detachable module of its size.
The innovation stems from efforts to overcome long-standing limitations in robotic manipulators: asymmetric designs that only grasp from one side and restricted reach. By adopting a symmetrical structure and independent locomotion, the hand enhances flexibility and could reduce reliance on complex positioning systems typically needed for fine manipulation in cluttered environments.
Beyond industrial use, applications could expand into electronics assembly and maintenance where robots must navigate intricate assemblies or manipulate components in confined enclosures. Integrating this kind of modular actuator with sensor arrays, vision systems and control electronics could yield smarter robotic assistants tailored for delicate tasks in manufacturing and beyond.
The work, published in Nature Communications, represents a step toward more adaptable robotic manipulators that blend mechanical dexterity with autonomous mobility. Future research will likely explore optimized control algorithms, enhanced sensing integration and real-world deployment in environments where traditional manipulators struggle.
