




A drone flew through openings with only 5 cm clearance, tracked moving gaps in real time, and adjusted its orientation using an AI-based control system.
Researchers at Zhejiang University have developed an AI-based control system that enables quadcopter drones to fly through narrow openings with minimal sensor hardware. During testing, the drone successfully navigated openings with as little as 5 cm of clearance on either side, adjusted to moving targets in real time, and passed through gaps with different shapes and orientations.
The system uses a neural network to convert camera images and onboard sensor data directly into flight commands. This removes the need for the conventional robotics pipeline that typically includes state estimation, gap detection, trajectory planning, and control. As a result, the drone can make rapid flight decisions while performing complex maneuvers in confined spaces.
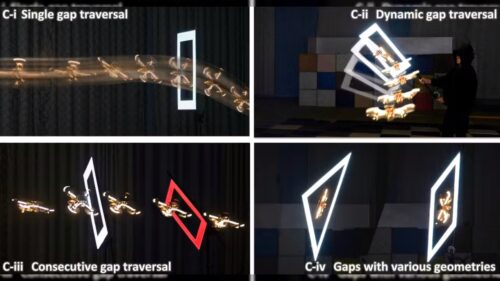
In one demonstration, the drone flew through a rectangular opening measuring 60 cm by 20 cm. The system automatically selected the best orientation for traversal, often rolling the aircraft so that its narrowest dimension aligned with the gap. It also handled openings rotated by up to 90 degrees, sometimes flying nearly on its side while maintaining control.
The drone was able to react to moving targets despite not being specifically trained for dynamic gaps. When researchers moved or rotated a handheld opening during flight, the system adjusted its trajectory in real time and continued through the target.
Additional tests included flights through multiple closely spaced openings and gaps with different geometries, including triangular and parallelogram shapes. Because the policy learned directly from experience, it did not require manually designed visual features or predefined flight strategies for each opening type.
The researchers trained the system using reinforcement learning. Since narrow-gap flight leaves little room for error, they supplemented the learning process with trajectories generated by a model-based planner, helping the neural network discover feasible flight behaviors more efficiently.
The team believes the technology could support drone operations in environments such as collapsed buildings, tunnels, caves, and industrial facilities, where navigating through tight spaces is often critical.