



A compact sensor that combines vision and touch, helping robots detect objects before contact and adjust grip after contact for more precise manipulation.
A new electronics sensing platform called FingerEye could significantly improve robotic dexterity by merging visual perception and tactile feedback into a single compact fingertip device. Developed by researchers at the National University of Singapore and RoboScience The system allows robots to sense objects before touching them, detect contact forces during handling, and adapt movements in real time—addressing a major limitation in current robotic grippers.

Most existing robotic tactile sensors begin working only after physical contact is made. That means robots often struggle with precise positioning, soft grasping, or handling delicate and irregular objects. FingerEye bridges this gap by providing continuous sensing across all interaction stages: approach, touch and manipulation.
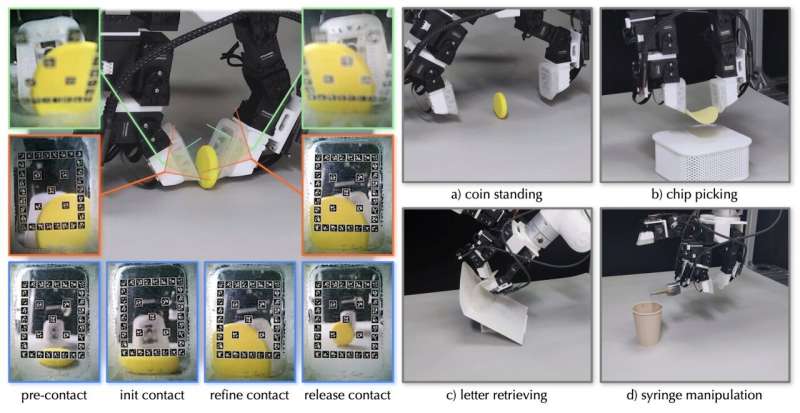
The device integrates binocular RGB micro-cameras that give close-range visual cues and implicit stereo depth, helping robotic fingers align accurately with objects before contact. Once touch occurs, a deformable compliant ring inside the sensor bends under force. Marker-based tracking then converts those deformations into estimates of pressure, torque and contact direction.
Researchers paired the hardware with a vision-tactile imitation learning model that combines signals from multiple FingerEye sensors. They also created a digital twin simulation platform to improve training and boost performance across changing object shapes, textures and appearances.
In demonstrations, robots equipped with the system completed demanding fine-motor tasks such as standing a coin upright, picking chips, retrieving letters from tight spaces and manipulating syringes. These tasks typically require a combination of visual alignment and force-sensitive touch control.
For the electronics industry, the development highlights growing demand for multimodal sensing modules that fuse cameras, motion tracking and force detection in compact packages. Such systems could influence next-generation warehouse robots, electronics assembly automation, medical robotics and service machines operating in human environments.