



It has electromagnets lined at the edges of each cube that attract or repel each other to reconfigure into different shapes and sizes
Robots have been a key part of popular sci-fi movies, offering a glimpse into the future as to what our life with these walking machines will be like.

At present, several “fixed” robots can perform a myriad of dedicated functions. Work has also been going on to develop self-reconfigurable robots; machines that can change and adapt themselves to their surrounding terrain – just like an athlete. Although their application is quite promising, their size, assembling complexity and cost prevent large scale production. On top of that, separate actuation mechanisms that are bulky and complex such as motors, gears and transmissions inhibit the robot’s flexibility.
So to address this issue, an engineering team from MIT CSAIL has devised a cube-shaped reconfigurable robot structure called ElectroVoxel that utilises an electromagnet-based actuation framework to reconfigure in three dimensions via pivoting. The modular self-reconfigurable robot (MSRR) has electromagnets lined at the edges of each cube that attract or repel each other to reconfigure into different shapes and sizes. Applications include space exploration, search and rescue, shape-changing user interfaces and endlessly more.

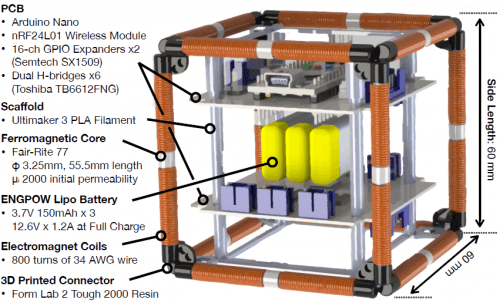
Powered by a LiPo battery, the 3D printed cube-shaped structure has nearly 800 turns of electromagnet wound around a ferromagnetic core. The electric circuit consists of an Arduino Nano integrated with a wireless transceiver (nRF24L01), two 16-channel GPIO expanders (Semtech SX1509) and 6 full dual H-bridges (Toshiba TB6612FNG). Each module is a 60mm side length cube in whose middle lie two PCBs that sandwich three batteries. With the help of software, simulation of the MSRR occurs in real-time.
Because the earth’s gravity field is quite strong and does not allow the electromagnetic forces to pivot, the modules had to be deployed and tested in microgravity on a parabolic flight, where it manoeuvred across a pivot without any constraints. The team wishes to improve upon that by incorporating a braking system on impact via closed-loop control and combining IMUs and electromagnet-based inductive sensing. To conserve power, passive permanent magnets in cube faces can be included to form stable face-to-face bonds, or replace electromagnets with electro-permanent or programmable magnets and power electronics such as boost circuits for reconfiguring untethered cubes against gravity moments for terrestrial applications.
Read here for more
