


Nature-inspired designs promise smarter, more stable subsea bots but key tech gaps remain.
Underwater robotics, a field at the intersection of sensing electronics, actuation, and AI has made notable strides by borrowing design cues from fish and rays. Yet a new npj Robotics review shows that even with these advances, fundamental challenges tied to actuators, electronics integration, and autonomous navigation persist before these machines can reliably explore the deep ocean.

The ocean still holds enormous unknowns: roughly 74 % of the seafloor is unmapped, demanding robotic platforms that can withstand pressure, carry sophisticated sensors, and navigate without surface links. Traditional propeller-based systems struggle with stability and efficiency in real currents, prompting engineers to rethink underwater locomotion at the hardware level.
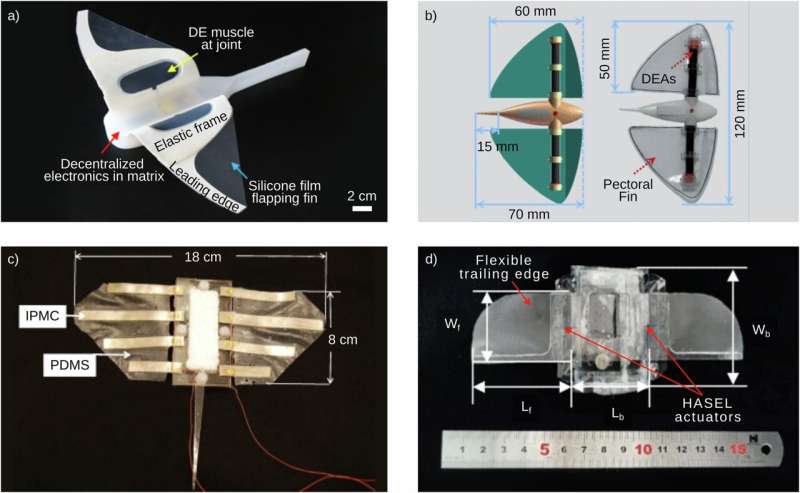
Researchers have cataloged 47 ray-inspired robotic models that use varied electronic and mechanical actuation strategies to mimic how rays glide through water. Larger robots tend to rely on conventional electric motors, where size and electronic control systems offer sufficient torque and reliability. Small robots, by contrast, often incorporate smart materials and electrically driven flexible structures that deform under voltage, delivering smooth, fin-like motion suited to miniaturized electronics platforms.
What’s striking is the actuator gap at intermediate scales: mid-sized designs suffer because pulse-based smart materials lack force for effective thrust, while motors suitable for larger systems add too much weight and complexity for efficient mid-range operation. This highlights a broader design tradeoff in robotics electronics and materials engineering that’s yet to be solved.
Beyond locomotion, the next frontier lies in sensory electronics and onboard intelligence. Underwater bots must merge data from pressure-tolerant sensors with AI capable of navigating unpredictable environments without GPS or high-bandwidth communication, a non-trivial challenge for embedded systems in corrosive, high-pressure conditions. While the review underlines meaningful progress in bio-inspired mechanics and electromechanical actuation, it underscores that achieving robust, scalable underwater robots will require breakthroughs in electronics design, power-efficient actuation, and AI-driven control systems especially for real-world missions beyond research labs.