



What if a robot could move multiple objects simultaneously, like a human hand? Learn about the robotic gripper inspired by the human ability to grasp various objects simultaneously.
A research team from Seoul National University has developed a robotic gripper inspired by the human ability to grasp multiple objects simultaneously. The gripper is designed to move multiple items simultaneously, improving pick-and-place operations’ efficiency. It can also place individual objects precisely in their desired locations.

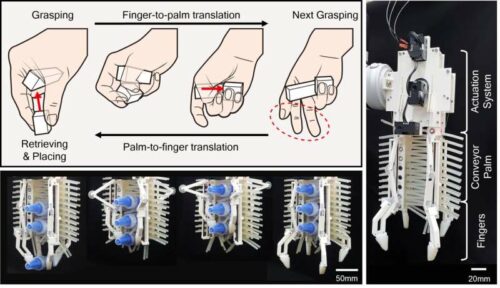
The researchers drew inspiration from a human technique known as “multi-object grasping,” where several items are moved together instead of individually. The team studied the human strategy of multi-object grasping, which works well in unstructured environments, and created a gripper that replicates this ability. The gripper can grasp objects one by one, store them, transfer multiple items at once, and place them individually at specific locations.
After transferring multiple objects, humans use palm-to-finger translation to move them from the palm to the fingers, one by one, and place them at desired locations. These in-hand translation movements are crucial for multi-object grasping in unstructured environments.
Inspired by this human technique, the research team developed a gripper with in-hand translation capabilities. The gripper includes fingers that can move objects and a conveyor’s palm to store multiple items simultaneously. Powered by two motors, the fingers grasp objects and move them to the palm.
The decoupling links in the fingers separate the grasping and transferring actions, simplifying control. The conveyor palm consists of two belts with elastic hairs on their surfaces, driven by a single motor. As the belts rotate, objects are positioned between the hairs, allowing the gripper to store and transfer multiple objects simultaneously.
The team demonstrated that their developed gripper, MOGrip, can be used in various unstructured pick-and-place tasks through lab-scale experiments. In a logistics setting, they showed that eight objects on a shelf could be moved with just two reciprocating motions. This approach reduced the processing time by 34% and the robotic arm’s travel distance by 71% compared to single-object grasping.
In a domestic environment, the gripper successfully stored all items on a desk and placed them individually in their desired locations. MOGrip is expected to be useful in logistics and home settings and other unstructured tasks, like bin-picking.
Reference: Jaemin Eom et al, MOGrip: Gripper for multiobject grasping in pick-and-place tasks using translational movements of fingers, Science Robotics (2024). DOI: 10.1126/scirobotics.ado3939
