



This engine, capable of producing up to 580 Newtons of force, could revolutionise assistive technologies, enhancing mobility with unprecedented efficiency and power.
Traditionally, most fluid engines require a physical connection to an external power source, such as a large air compressor, which limits their practicality. Previous untethered fluid engines could not generate sufficient force, further restricting their usefulness. The new engine developed by Su’s team overcomes both of these challenges.

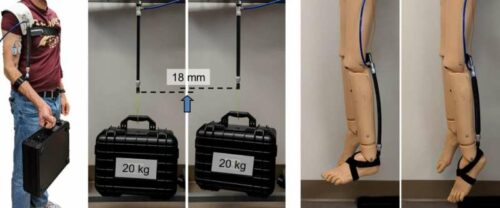
Researchers at North Carolina State University have developed a lightweight fluidic engine designed to power muscle-mimicking soft robots for assistive devices. This engine stands out because it can generate significant force without relying on an external power source. The team mentioned that the Soft robots powered by fluid engines, such as hydraulic or pneumatic systems, can replicate muscle behaviour in ways rigid robots cannot. This makes them particularly suitable for assistive devices that enhance upper or lower limb mobility. Their fluidic engine operates independently of an external power source while generating up to 580 Newtons of force. The engine achieves this by pumping oil into and out of a chamber within a soft robot, mimicking the flexing and relaxing actions of an artificial muscle. A battery-powered high-torque motor drives the pump, enabling it to produce substantial pressure and force.
In their proof-of-concept testing, the researchers evaluated both the force output and the efficiency of the engine in converting electrical power to fluidic power. They generated an unprecedented amount of force for an untethered engine while maintaining a low weight. Their fluidic engine’s maximum efficiency surpasses that of previous portable, untethered engines. The findings are detailed in the paper “Untethered Fluidic Engine for High-Force Soft Wearable Robots,” published in the journal Advanced Intelligent Systems, accessible as open access. This marks a significant advancement in the field of soft robotics, particularly for assistive technologies.
References: Antonio Di Lallo et al, Untethered Fluidic Engine for High‐Force Soft Wearable Robots, Advanced Intelligent Systems (2024). DOI: 10.1002/aisy.202400171
