




A new bio-inspired drone, modeled after the flying squirrel, brings remarkable agility and control to aerial robotics, opening doors to advanced applications in rescue, surveillance, and more.
Drones are already transforming industries from filmmaking to agriculture, but researchers are now pushing their limits further. Engineers at South Korea’s Pohang University of Science and Technology, in collaboration with the Agency for Defense Development’s AI Autonomy Technology Center, have developed a drone inspired by the flying squirrel—featuring foldable wings that dramatically improve aerial maneuverability.

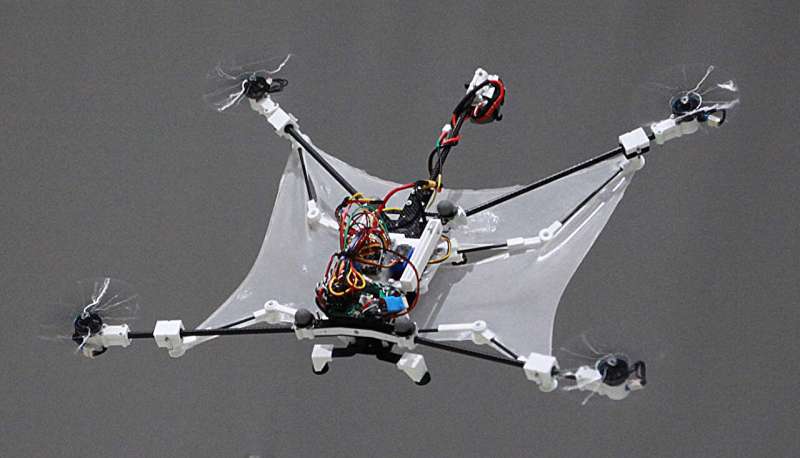
The flying squirrel uses flaps of skin stretched between its limbs to glide and control its descent. Mimicking this, the research team created a drone that can deploy silicone-based wing membranes to generate aerodynamic drag, allowing for rapid stops and sharp directional changes—movements that standard drones often struggle to execute.
Their latest study builds on earlier work that introduced the concept and reinforcement learning techniques used to train the drone. This new version includes a novel Thrust-Wing Coordination Control (TWCC) strategy powered by a neural network trained to predict aerodynamic drag. The control system coordinates both wing deployment and motor thrust in real time to achieve smooth, reactive flight.
Crucially, the drone functions entirely on an onboard microcontroller—without requiring any external computing—making it lightweight, energy-efficient, and highly adaptable. This sets it apart from other advanced drones that depend on external computation. The research team also engineered a compact hardware design that allows the wing membranes to deploy or retract swiftly, maintaining the standard quadrotor shape when the wings are not in use. Their drone demonstrates precise trajectory tracking and obstacle avoidance, potentially paving the way for future applications in remote monitoring, search and rescue, defense, and cinematography.
Looking ahead, the team plans to enhance the drone’s gliding and landing capabilities by studying real squirrel behavior, aiming to allow the drone to land on vertical surfaces like walls or trees—just like its biological inspiration. “We were inspired by flying squirrels’ ability to decelerate quickly before landing by spreading their limbs,” said researchers Dohyeon Lee, Jun-Gill Kang, and Soohee Han. “We believed similar drag-based control could be applied to drones to expand their dynamic abilities.”
