



A mathematical method that finally tames asynchronous, mixed-rate sensor data, paving the way for safer autonomous systems, smarter robots, and more reliable electronics built on complex sensing networks.
In a development that could reshape how next-generation electronic systems are designed, researchers at Kumamoto University have introduced a mathematical modeling technique that accurately captures the behavior of sensor-driven systems operating at mismatched sampling rates. The advance targets a long-standing problem in electronics engineering: multirate sensing, where cameras, IMUs, LiDAR units, and other heterogeneous sensors generate data streams at different speeds, disrupting system modeling and degrading control performance.

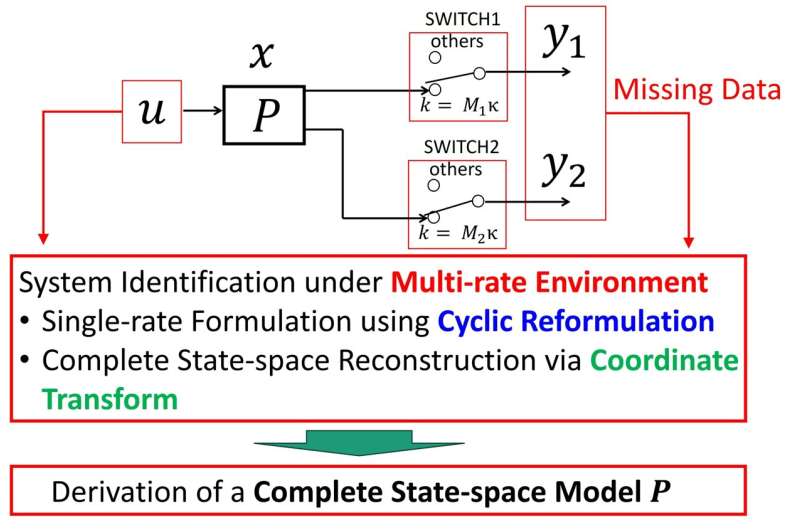
At the core of the work is an algorithm that converts multirate sensor inputs into a unified, time-invariant representation. By combining cyclic reformulation with a state coordinate transformation, the method essentially “normalizes” the asynchronous data flow so that established system-identification tools traditionally built for single-rate data can operate without distortion. This reframing allows engineers to recover system parameters with high fidelity, even when signals arrive at uneven intervals.
For electronics systems that depend on tightly coupled sensing/autonomous navigation modules, robotic controllers, industrial process monitors the implications are significant. Accurate system identification governs everything from stability margins in power electronics to sensor fusion pipelines in embedded systems. When modeling errors propagate, they can lead to latency, drift, or dangerous miscalculations in real-world deployments. The new framework addresses this by eliminating reliance on artificial periodic input signals and instead working directly with the noisy, irregular data typical of deployed electronics hardware.
Early simulations demonstrate strong resilience against missing samples and unequal sampling failures that often cripple earlier techniques. The algorithm reconstructs structural model details with high precision, offering a level of reliability that makes it more suitable for implementation in embedded electronics and safety-critical control loops.
The potential reach spans multiple electronics domains. IoT devices equipped with mixed-rate environmental sensors could benefit from improved fusion accuracy. Industrial automation systems may achieve more stable predictive control. Robotics and autonomous platforms could gain safer navigation capabilities through cleaner multimodal sensing models.By providing a mathematically rigorous yet practical path to handle asynchronous sensing, Kumamoto University’s researchers have delivered a tool that strengthens the backbone of modern electronic systems where multiple sensors must act as one coherent, reliable source of truth.

