




A bio-inspired slip prevention system that lets robots adjust their movements like humans, keeping fragile or slippery objects secure without crushing them — paving the way for safer, smarter automation in homes, factories, and healthcare.

Robots have long struggled with one delicate challenge — holding on to objects without crushing or dropping them. Traditionally, the fix was simple but blunt: squeeze harder. Now, researchers from the University of Lincoln, Toshiba Europe’s Cambridge Research Laboratory, University of Surrey, Arizona State University, and KAIST have unveiled a more human-inspired solution.

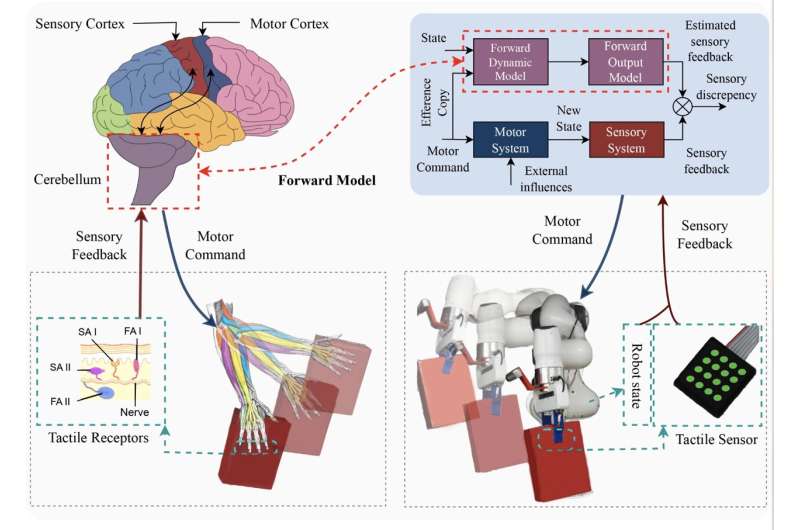
Instead of relying solely on grip force, the team’s new controller predicts when an object might slip and subtly adjusts the robot’s movements — slowing down, tilting, or shifting position — just like humans do when a glass starts to slide from their hand. This predictive system uses a learned “world model” that forecasts future tactile sensations based on the robot’s planned actions, enabling proactive adjustments before a slip occurs.
By integrating trajectory modulation with traditional grip force control, robots can manage fragile, wet, or oddly shaped items without increasing pressure. The system works even when grip strength cannot be changed, making it ideal for hardware with fixed-force grippers. Tests in dynamic, real-world-like environments showed significant improvements over conventional force-only controllers, with the robot maintaining a stable hold more often and with less risk of damage.
This approach opens the door to robots that can safely operate in environments from homes and manufacturing floors to healthcare settings. A robot nurse could hand over a cup of water without spilling; a warehouse bot could move slippery packaging without tearing it; a factory robot could handle delicate components without cracking them. Senior author Amir Ghalamzan explains, “We’ve shown that embedding a tactile predictive model into the control loop is not only feasible, but highly effective.” The team is now working to make the controller faster and more efficient, integrate it with vision systems for dual tactile-visual planning, and extend its skills to deformable or two-handed objects.As predictive control becomes more transparent and explainable, robots could gain human-like dexterity and reliability — reshaping how we trust machines to interact with our physical world.