




- Researchers have developed ProTac, a soft robotic link equipped with both tactile and proximity sensing capabilities.
- In addition to creating ProTac, the team developed a new simulation and learning framework to prepare the robotic link.
Over the past few years, robots have evolved into highly advanced machines that can perform or aid humans in various tasks. Robots should be safe and user-friendly. Robots in human-robot interactions (HRIs) must react appropriately to collisions and respond safely to intentional physical contact. Enhancing HRIs involves enabling robots to sense their environment using touch, sound, and sight, emphasizing tactile sensing for physical contact. However, challenges exist in developing large-scale tactile sensors; only some systems detect touchless stimuli.
Associate Professor Van Anh Ho and her team at Japan Advanced Institute of Science and Technology (JAIST) have developed ProTac, a soft robotic link with tactile and proximity sensing capabilities. In addition to creating ProTac, the team developed a new simulation and learning framework to prepare the robotic link.

Robotic links connect joints and act as segments in robotic limbs. ProTac is a soft, cylindrical segment with tactile and proximity-sensing capabilities designed for a robotic arm. It efficiently utilizes space. ProTac’s “soft magic skin” is touch-sensitive but resilient. Reflective marker arrays are inside, with fisheye cameras at both ends. When the skin is deformed by contact, the cameras capture the markers’ positions for precise location and intensity. ProTac’s outer skin is made of a functional polymer that turns transparent with an applied voltage, enabling proximity calculations using the fisheye cameras to image its surroundings.
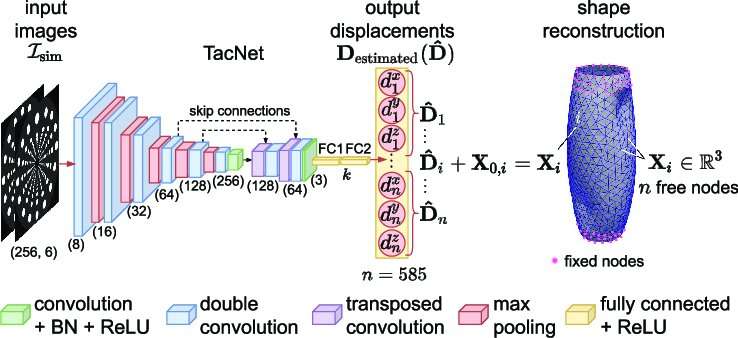
The researchers created SimTacLS, an open-source simulation and learning framework based on SOFA and Gazebo physics engines, to train ProTac for proximity and tactile measurements. It uses simulated and experimental data to consider the physics of soft contact and sensor image rendering. SimTacLS allows cost-effective implementation of tactile perception in robotic links. It also enables validating sensor designs and learning-based sensing performance before fabrication and implementation. This work paves the way for humans and robots to coexist harmoniously. The proposed device and framework offer ultimate solutions for designing robots with softness, whole-body and multimodal sensing, and safety control strategies.
Researchers believe the techniques can be expanded to other categories of robotic systems, including mobile and aerial robots, besides the robotic manipulator showcased in the research.
Reference : Quan Khanh Luu et al, Simulation, Learning, and Application of Vision-Based Tactile Sensing at Large Scale, IEEE Transactions on Robotics (2023). DOI: 10.1109/TRO.2023.3245983.