


A new signal-processing approach delivers stable, sub-meter satellite positioning for autonomous systems where city interference usually breaks GNSS accuracy.
A new satellite navigation method delivers stable, high-accuracy positioning for autonomous vehicles in dense urban environments without depending on fragile carrier-phase ambiguity resolution that trips up current high-precision GNSS solutions. Early tests in Nagoya and Tokyo show the approach consistently achieves sub-meter accuracy even when satellite visibility is poor, outperforming standard GNSS techniques in five out of six challenging city scenarios.

Traditional GNSS technologies such as real-time kinematic (RTK) positioning struggle in urban “canyons” where tall buildings block or reflect signals. These effects create non-line-of-sight (NLOS) interference and multipath errors, which can inflate position errors from centimeters to dangerous for safety-critical autonomous systems.
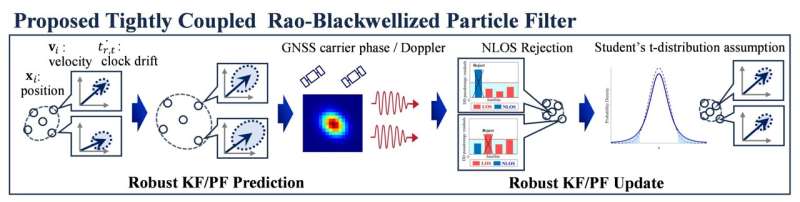
The new method developed by researchers at Meijo University in Japanuses a probabilistic particle-filter framework that does not attempt to fix integer ambiguities on carrier-phase measurements, the traditional sticking point for urban GNSS. Instead, it evaluates multiple possible position hypotheses using available fractional phase data, making the system far more resilient to signal disruption.
To further strengthen performance, the team couples this particle filter with a Kalman filter on raw Doppler measurements to derive reliable vehicle velocity and receiver clock estimates, and integrates additional robustness steps like particle-wise NLOS satellite rejection and filtering based on a Student’s t-distribution. These measures help suppress outliers caused by multipath and partial blockage.
In real-world vehicle trials across six different urban routes, the algorithm delivered consistent sub-meter positioning in five tests and outperformed the best conventional solutions by up to nearly 30 percentage points in the toughest scenario, underscoring that new GNSS processing methods can push beyond the perceived limitations of satellite navigation in cities. This research, published in IEEE Robotics and Automation Letters, suggests that robust GNSS-only positioning without auxiliary sensors or augmentation infrastructure may be within reach for future autonomous driving and robotic platforms, even in the most signal-challenging urban settings.
