




New modular robot design leverages shared electronics and power to maintain function even when modules fail.
Swiss researchers have devised a modular robot that flips a longstanding robotics challenge on its head: instead of larger robot systems becoming more failure-prone as they add parts, this new design actually becomes more resilient as it scales. The advancement comes from sharing power, sensors, and communication electronics across modules, allowing collective resource use to compensate for individual failures, a notable shift in how robotics hardware can be engineered.
Conventional modular robots often suffer when one unit breaks: the system can lose mobility, sensing, or communication, degrading performance or halting tasks entirely. The Swiss team led by Jamie Paik at École Polytechnique Fédérale de Lausanne tackled this by embedding shared electronic and power resource networks among modules. This enables neighboring parts to pick up the slack if one unit loses its battery, sensors, or wireless link.

Their research, detailed in Science Robotics, shows that when all critical resources, energy, sensing, and communications are shared, the robot’s overall reliability improves with the number of modules. The key is what the team calls “hyper-redundancy”: a system-level electronics architecture where no single module holds exclusive control of essential functions. Partial redundancy wasn’t enough in prior designs, the researchers found; only when the entire set of resources could be redistributed did reliability trends reverse.
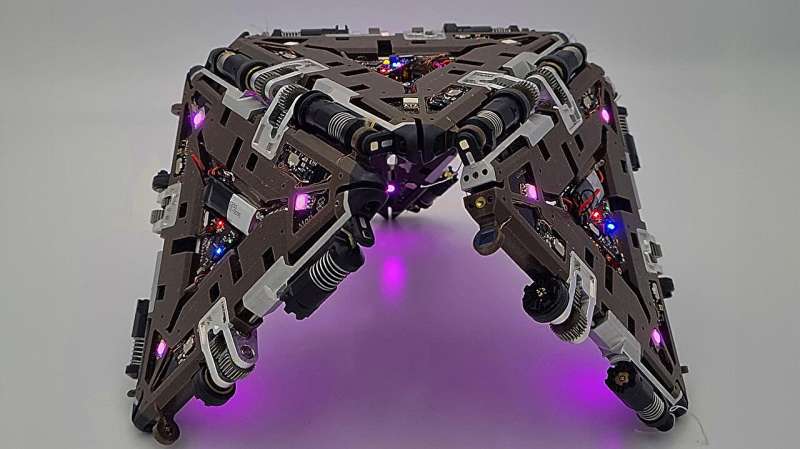
To demonstrate the concept, the group tested the Mori3 modular origami robot, made of four triangular units. In trials, the battery, communication, and sensing lines to a central module were cut, effectively rendering it “dead.”
Instead of halting, the adjacent modules energetically compensated, rerouting power and data through shared circuitry and enabling the robot to continue walking and maneuvering under obstacles. The research draws inspiration from biological systems, where energy and information are distributed across many cells to withstand localized failure. Birds, trees, and even cellular networks use such collective strategies to enhance robustness, a template the robotics team adapted for electronic and power design. Looking forward, the collaborators suggest this shared-resource approach could scale to larger modular systems and even swarms, where docking interfaces could let units trade energy and signals on the fly. If applied widely, this design could influence electronic architectures in robots used for complex, high-risk tasks where hardware reliability is essential.