



A new swam robotic system inspired by social insects could transform mining operations, increasing productivity and reducing risk.
Scientists from the University of Adelaide have developed a swarm robotic system inspired by ants and bees, which could make mining safer, more efficient and sustainable. The new technology allows the team of small robots to operate without a centralised control system, ensuring that mining activities are not disrupted even when individual robots break down.
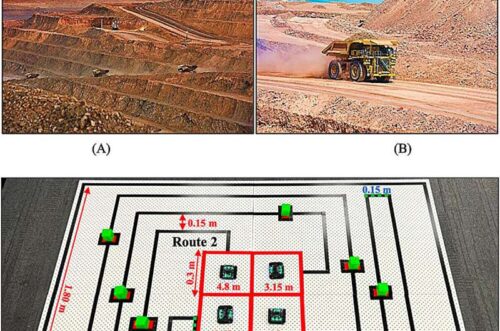
The researchers applied principles of social insect teamwork to teams of Zumo 2040 robots in a simulated mining environment. There were three different systems tested in the experiment: a basic system where robots collected the ore and then came back, an ant-inspired system in which robots share tasks, and a honeybee-inspired system in which robots first explore and map an area before collecting resources more efficiently.
However, the honeybee-inspired strategy performed best as it reduced the travel distance up to 80 per cent, reduced energy expenditure by about 50 per cent, and completed ore delivery tasks up to 60 per cent faster than the basic approach. On the other hand, the ants-inspired strategy improved performance by dividing the work between robots, with one robot locating resources while another transported them.
Lead author Dr. Joven Tan said, “Social insects have developed very efficient ways of solving problems together.” He added, “By applying these ideas to robotics, we can create systems that are more efficient, adaptable and reliable for industries such as mining.”
According to the scientists, further work is needed before it is widely used in mines, including enhancing the sensors, increasing battery life, and adapting the robots to unpredictable underground conditions.
Project leader and co-author Dr. Noune Melkoumian from the School of Chemical Engineering said, “Swarm robotic systems could be used in dangerous or difficult-to-reach mining areas, reducing risks for workers while improving productivity.”