



A new artificial skin enables robots to sense temperature and pressure simultaneously, bringing human-like touch capabilities closer to physical AI systems.
Researchers at Seoul National University have developed an artificial skin technology that enables robots to perceive temperature and pressure similar to human skin. The multimodal tactile sensor can detect both thermal and mechanical stimuli within a single ultra thin device and is expected to serve as a future Physical AI system. This innovation was described in the Nature Materials journal and proved to be capable of high-resolution sensing akin to human touch.
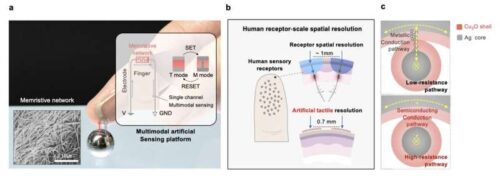
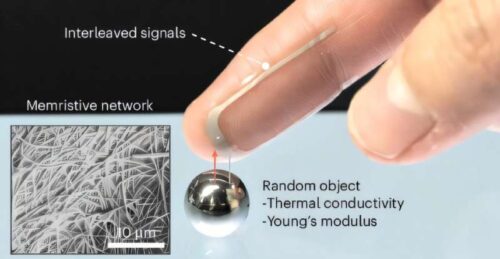
This novel sensing technique operates through a core-shell nanowire architecture that comprises a silver (Ag) core and a copper oxide (Cu₂O) shell. In contrast to other multimodal sensors, which use a stacked structure of several layers, this new sensor uses a single thin, flexible layer which can switch between thermal sensing mode (T mode) and mechanical sensing mode (M mode) 16 times per second. The novel design also offers high-speed performance up to sub-microsecond response to mechanical and millisecond response to thermal stimuli.
The researchers tested the technology by training a model based on alternating inputs from both the modes of sensing. The classification accuracy was improved from approximately 65% when the model was trained with thermal or mechanical data separately to 95% after the integration of both the modes of sensing. Even with decreased inputs, the accuracy remained at 94.53%. Further experiments with the fingertip sensor along with the wireless measurement board helped the technology achieve an accuracy of 83% in identifying 20 everyday objects.
In addition, the researchers created a multi-array platform for measuring temperature and pressure distributions with a resolution similar to human skin, showing how the technology can be scaled up from individual sensor devices to artificial skin systems. The multimodal tactile sensor has potential applications in prosthetics, wearable electronic skin, soft robotics, robot grippers, and human-machine interface.
For the researchers, this technology is anticipated to become a core technology for tactile perception in next-generation robots and physical AI systems as it is capable of processing many stimuli using a single ultrathin layer without the need for complex stacks of sensors. With the ability to simplify the design of systems along with high-resolution touch sensing, this technology positions it as a promising foundation for next-generation intelligent tactile platforms.