


Quadcopters are becoming more widespread because they are incredibly stable, fast and fun to fly. Newer technologies have allowed development of smaller and cheaper quads with vast capabilities. While a quadcopter can provide endless fun of flying an RC toy with cameras, these are also popular for taking professional aerial photos or videos, surveillance and 3D terrain mapping. They also help build FPV (first person view) systems that allow you to fly as if you are sitting inside the craft like a pilot.
If you are curious to know how to design a Quadcopter, mentioned below are some industry-standard reference designs on Quadropters including necessary documentation like hardware and software design files, user guides, schematics, and more.
Quadcopter For Ground/Air/Water UAV’s
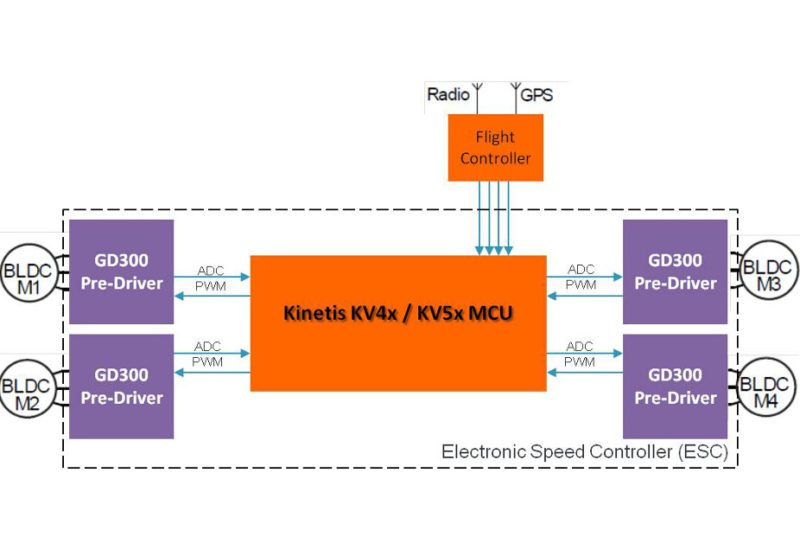
Here is a quadcopter drone which is a very popular design for ground, air and water unmanned aerial vehicles (UAV) as well as motor control applications. It consists of a flight controller and four electronic speed controllers (ESCs), one for each motor. The flight controller is equipped with a radio to receive flight commands provided by the pilot and the inertial measurement unit (IMU). The IMU provides information (such as velocity and orientation) that are necessary for autonomous stabilization of the vehicle, using the internal accelerometer, gyroscope, and sometimes the magnetometer and GPS receiver. This design is based on a single Kinetis KV4x or Kinetis KV5x MCU which helps to drive four BLDC motors of ESC. More on this Reference Design

Arduino-based UAV Helps in 3D Mapping

ArduCopter is an open-source UAV platform based on Arduino. It is an advanced autopilot system for multicopters, helicopters, and other rotor vehicles for applications like 3D mapping. The design offers both enhanced remote control flight (via a number of intelligent flight modes) and execution of fully autonomous missions. Several web applications can be used to allow sharing flight data, videos or even allow web based control. Other features include automatic takeoff/landing and fail safety which detects when vehicle loses transmitter contact. A mission planner software can be used to set up the Copter without any programming. It can be used to point and click waypoints to automate the mission and provide a route for the Copter, and provide visual displays for vehicle state, settings and telemetry. More on this Reference Design
Open-source RC Quadcopter for Surveillance
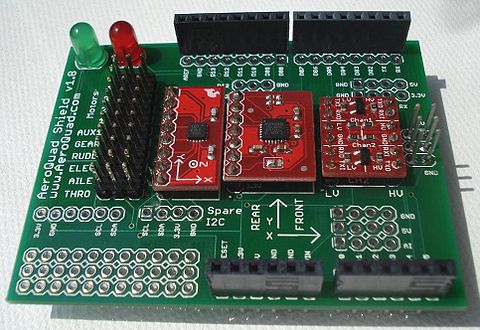
The AeroQuad is an open source hardware and software project dedicated to the construction of remote controlled four-rotor helicopters, called quadcopters or quadrocopters for purposes such as surveillance, search and rescue, and agricultural applications like mapping of fields. The latest software also supports additional multicopter configurations. The AeroQuad hardware consists of the fully-featured STM32-based AeroQuad32 flight controller board or an Arduino microcontroller (Mega 2560 or Uno) as the flight controller board. Additionally, it comes with an AeroQuad shield with various sensors, such as an accelerometer, gyroscope, magnetometer (heading), barometer (altitude hold) ultrasonic sensors and GPS. The design supports multiple flight configurations, enhanced battery monitoring options, multiple flight options, multiple receiver options and camera stabilization support. More on this Reference Design
Quadcopter Drone based on Cortex-M4 MCU
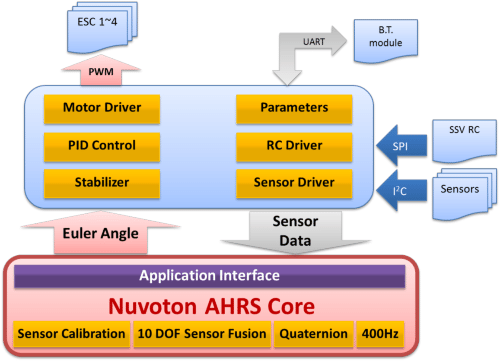
This reference design includes a real-time flight control board to help users develop flight applications with zero delays. The design is based on Nuvoton’s Cortex -M4 microcontroller supporting high speed ESC (400Hz). A proprietary 10-axis sensor algorithm system allows real-time control of flight dynamics with zero delays. Other components included are a joystick, a 2.4G RF module, and a section board with a Nu-Link-Me emulator that employs a Nuvoton’s Cortex -M4 development board. The system only needs to be connected to an airframe, voltage regulator, motor, rotors, and a portable lithium battery to begin flying. More on this Reference Design