



A new deep learning model from Cardiff University helps robots choose safer, more reliable paths—marking a shift from acrobatics to real-world navigation.

Robots may soon prioritize navigation accuracy over flashy stunts, thanks to a new deep learning model developed by researchers at Cardiff University. The system, called localization-aware navigation, teaches robots to choose paths that keep them oriented in space—even if those routes are longer—significantly improving performance in real-world scenarios.

In simulation tests using the iGibson environment, the method achieved a 49% success rate in difficult conditions, compared with 33% for standard SLAM-based navigation. Robots also maintained lower localization error and adapted better to unfamiliar environments, demonstrating stronger real-world potential.
The advancement addresses a long-standing challenge in robotics: reliable navigation outside of tightly controlled labs. Traditional approaches often separate two processes—path planning and localization—creating risk when a robot’s estimate of its position drifts. By integrating the two into a single decision-making loop, Cardiff’s model ensures movement choices are constantly informed by localization quality.
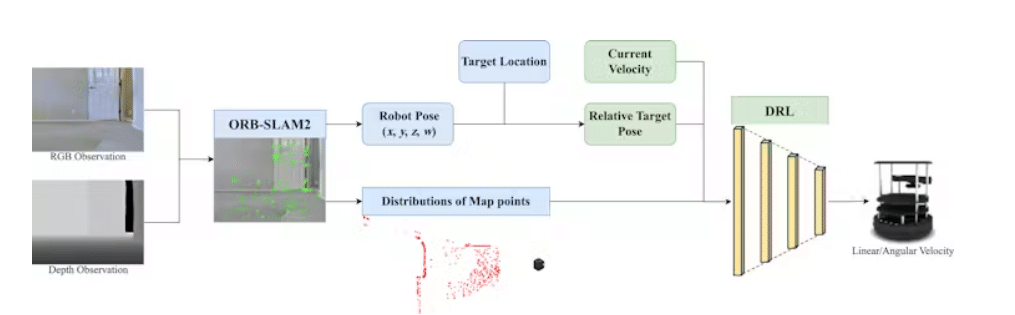
The system leverages RGB-D camera input and ORB-SLAM2, a popular visual simultaneous localization and mapping algorithm. Instead of assuming ORB-SLAM2 always succeeds, the model evaluates the spatial distribution of map points, grouping them into angular sectors to measure how visually “safe” different directions are. Robots are rewarded for choosing routes rich in visual cues rather than featureless hallways that might confuse mapping systems.
A key innovation is its dynamic feedback mechanism. Unlike traditional models that rely on rigid penalty thresholds, Cardiff’s framework adapts thresholds using relative pose error, providing real-time assessment of whether a movement improves or worsens localization. This adaptability helps robots make better choices in changing or unpredictable settings.
While many robotics demonstrations spotlight acrobatics like flips or cartwheels, such feats rarely translate into practical use cases. Navigation, however, is fundamental for real-world deployment—from delivery robots navigating crowded campuses to autonomous machines working in warehouses or hospitals. The team’s next step is moving from simulation to real-world trials, where robots will navigate dynamic environments such as pedestrian-heavy spaces. If successful, localization-aware navigation could become a cornerstone in robotics, shifting the focus from spectacle to reliability.
