



Robots that move, lift, and sense objects without electronics are now possible. They work using materials that snap and bend in predictable ways.
Soft robots usually rely on computers, sensors, and batteries, which limits their use in extreme or hard-to-reach environments like space, deep underwater, or nuclear sites. Researchers at Purdue University are tackling this problem by designing robots that operate entirely through physical behavior, without electronics.

The approach uses bistability, a property where a structure can rest in two stable positions. This phenomenon is common in nature—for example, foldable wings of earwigs and the leaf-closing mechanism of Venus flytraps. Engineers are using bistability to create programmable structures that can store energy, perform work, and even act as mechanical computers.
One key material is the fidget popper, a metamaterial dome that snaps between two states. By combining multiple domes, researchers can precisely control the shape and motion of soft robots. The domes are made of 3D-printed thermoplastic polyurethane, and metastability allows temporary states, enabling robots to have time-dependent responses.
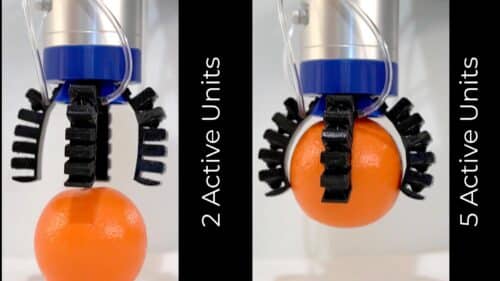
Two types of robots demonstrate these principles: a gripper and a walker. The gripper uses bistable domes to sense and lift objects of varying sizes and weights without a computer. It engages additional domes only if an object is too heavy and releases objects as metastable domes return to their original state. The walker moves forward or turns by sequencing domes arranged at different angles, entirely through their physical design.
These robots are also robust. Even when the gripper’s domes are damaged, the arms continue functioning due to the inherent properties of bistable structures.
By harnessing bistability, researchers aim to create robots that can operate in environments too extreme or inaccessible for conventional robots, offering solutions for applications in space, nuclear reactors, or deep underwater operations.