


 Can we play Pokémon Go when we are inside a room or do we have to go outside every time? Why we always have to go outdoors to play Pokémon Go? The answer is simple the positioning technique used in our Smartphone, known as Global Positioning System GPS or Global Navigation Satellite System GNSS, does not work properly inside home or in the areas covered by trees or surrounded by concrete buildings. As GPS uses satellite signals for positioning, it works well under a clear sky. We spend nearly 70% of our time indoors. Therefore, there are many applications which require indoor navigation of humans and machines. But can we locate our self in a map or make use of Smartphone’s navigation utility under such circumstances? Have you ever wondered what it would have been great if GPS technology could have been used inside a big airport or large shopping mall? You often struggle to find your gate number in a big International airport. You spend a lot of time on finding the right store you want to visit in a big shopping mall. How can you beat the long search for your destination indoors? Indoor Positioning and navigation have become very important to the people in the last two decades due to setting up of huge shopping malls, airports etc where a person can easily get lost. Advancement in different technologies has paved the way for easy & accurate Indoor Positioning Systems (IPS) to tackle indoor navigation problem head-on.
Can we play Pokémon Go when we are inside a room or do we have to go outside every time? Why we always have to go outdoors to play Pokémon Go? The answer is simple the positioning technique used in our Smartphone, known as Global Positioning System GPS or Global Navigation Satellite System GNSS, does not work properly inside home or in the areas covered by trees or surrounded by concrete buildings. As GPS uses satellite signals for positioning, it works well under a clear sky. We spend nearly 70% of our time indoors. Therefore, there are many applications which require indoor navigation of humans and machines. But can we locate our self in a map or make use of Smartphone’s navigation utility under such circumstances? Have you ever wondered what it would have been great if GPS technology could have been used inside a big airport or large shopping mall? You often struggle to find your gate number in a big International airport. You spend a lot of time on finding the right store you want to visit in a big shopping mall. How can you beat the long search for your destination indoors? Indoor Positioning and navigation have become very important to the people in the last two decades due to setting up of huge shopping malls, airports etc where a person can easily get lost. Advancement in different technologies has paved the way for easy & accurate Indoor Positioning Systems (IPS) to tackle indoor navigation problem head-on.
Just as in-vehicle navigation systems have already revolutionized finding street addresses, IPS aim to revolutionize finding in-door/ GPS denied locations. IPS use different technologies, including distance measurement to nearby anchor nodes (nodes with known positions, e.g. WiFi access points or Bluetooth beacons), magnetic positioning, and pedestrian dead reckoning (PDR) using inertial sensors. They either actively locate mobile devices and tags, provide an ambient location of a pedestrian or environmental context for devices to get sensed.
The advancements in MEMS Technology have paved the way for low-cost inertial sensors which can be integrated into an Inertial Navigation System (INS). These MEMS-based sensors are less power hungry and small in size. This has lead to surge in using MEMS-based INS. Nowadays MEMS-based INS are often adapted in Smartphones, Smartwatches and trackers.

Why INS?
As it was mentioned above that there are many technologies for indoor positioning. So what is the need for inertial navigation sensors for indoor positioning? Unlike other popular indoor navigation devices, INS are infrastructure free. There is no need to have infrastructure preinstall for its operation. You can use an INS practically anywhere in the world. This significantly reduces setup time. Few other important applications of infrastructure free INS are in rescue / military operations, urban mapping and surveying, gaming & VR, IoT, a variety of indoor Location Based Services (LBS) and autonomous robotics etc.

Operating Principle
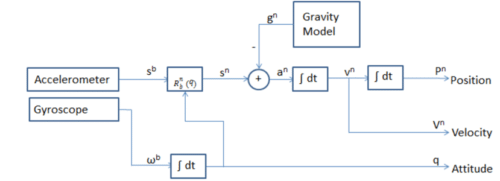
The INS apart from providing the possibility to integrate with GPS, in fact, provides a suitable alternative to the same. INS are self-contained systems that can operate in harsh radio environments. Conventional INS calculates the change in position through Dead Reckoning method. In Pedestrian Navigation this means measuring the length of the steps and the direction of the pedestrian given the initial position and heading is known. This method is often known as PDR. MEMS-based inertial sensors which form the core of any INS contains 3-axis accelerometer and 3 axis gyroscope. Now accelerometer measures acceleration and gyroscopes measure angular velocity. Displacement is calculated from the acceleration measurements and attitude is calculated from the measured angular velocity as shown in the illustration below. As the low-cost MEMS-based sensors measurements are noisy and therefore suffer from a huge accumulation of position and heading errors with time. This is because the new estimates of position and heading rely on previous estimates of the same. The error can be greatly reduced by Extended Kalman Filtering (EKF) based ZUPT approach.
It is to be noted that during a human gait there is always a momentary standstill or zero velocity moment as soon as the sole of the shoe touches the ground as can be seen in the Fig. 4.

The ZUPT algorithm consists of identifying step occurrences by detecting foot’s standstill instant. This is followed by estimating and correcting errors by making use of any non-zero velocity detected at the time epoch of step detection. This approach reduces errors in position and heading estimates at every detected step and prevents them from growing exponentially with time.
Tracking Performance
Tracking performance of the foot-mounted tracking device depends upon the number of factors which could influence the way hardware and the algorithm operates. Some of the factors which could influence the tracking performance of a ZUPT-aided foot-mounted navigation device are the type of shoes, device’s mounting scheme, wearers’ personal traits, walking surface, path profile, walking speed, environmental conditions, etc. These physiological, psychological and environmental factors typically influence gait of a person and hence have a direct effect on the performance of a foot-mounted inertial navigation system.
Oblu, a commercially available PDR device is chosen for tracking performance. It has a simple data interface that outputs PDR data at every step. The device is based on the open-source OpenShoe module shown in Fig. 6.

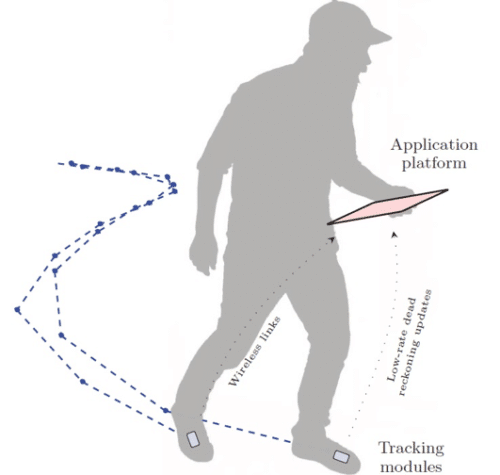
Dead reckoning is an iterative process that has to be carried out with the values of position and heading derived from the system. In other words, the device detects steps of its wearer, computes displacement and heading of each detected step with respect to the previous one and transmits it over Bluetooth interface @ ~ 1Hz to the application platform for construction of the tracked path as shown in Fig 7. The low rate PDR data (typically few tens of bytes per second) reduces computation burden on the application platform and chances of transmission losses as well.

The drawbacks of this system are that it requires initial values of position and heading and both position and heading errors grow as a function of time. This can be attributed to the integrative nature of the system. The total position error will depend on three error factors. These are initial position and heading errors depending on the mounting of oblu on the shoe, translation errors when navigating from one frame to another and heading or attitude errors both depending on the errors in the gyroscope measurements and last but not the least displacement error depending on the error of the accelerometer. Out of all these errors, the attitude errors of a gyroscope is the most critical factor. ZUPT approach reduces the error to a great extent but fails to completely eradicate them. These small errors affect the overall tracking performance of the shoe-mounted MEMS-based INS.
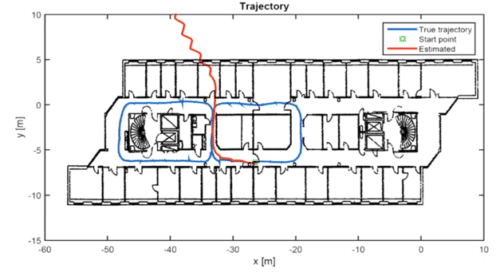
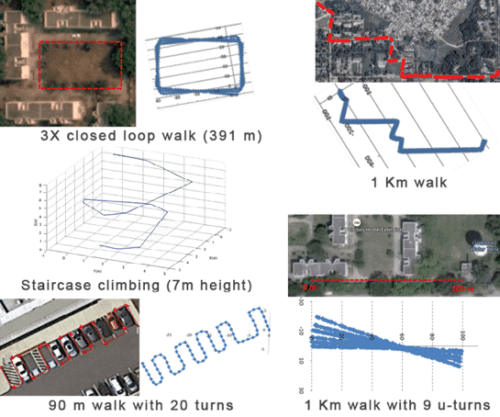
Here are some of the tracking performances as measured by oblu. Here, the red line is the path marked on the satellite images whereas the blue line is the actual tracked path by oblu.
Conclusion
Positioning and navigation using Smartphone are very beneficial in everyday life. Where would we be without the friendly voice of Google maps which shows us the way wherever we are? But alas it cannot help us indoors. With a shoe mounted PDR system there are possibilities to put such an affordable “indoor GPS” into practice.
Subhojyoti Bose works as Research Engineer at GT Silicon Pvt Ltd. He has worked on Sensors, Systems & Circuits R&D; Inertial Navigation, Multi-Sensor System, Embedded System, MEMS Design, Control System Design, VLSI. He has worked on a project for ISRO. He is an alumnus of IIT Kharagpur.
Amit Kumar Gupta is Founder & CEO at GT Silicon Pvt Ltd. He works on Business Development, Operations, Marketing, Product Management, Technology; International Exposure. He has worked for CeNSE, Freescale, Sarnoff etc. He is an alumnus of IIT Kanpur, IISc, IIM Bangalore.

We would like to receive price, spec, and availability info for your Oblu” Commercially available PDR device”