



The robotic gripper, designed to improve apple picking and tackle labour shortages, is set for field tests later this year.
Researchers at Washington State University have developed a robotic gripper capable of gently harvesting most apples from trees without causing damage to the fruit. This gripper is a component of a larger robotic system that the researchers envision will eventually perform fruit picking and other agricultural tasks. They aim to provide this technology to Washington farmers as a solution to help address persistent labour shortages in the agricultural sector.

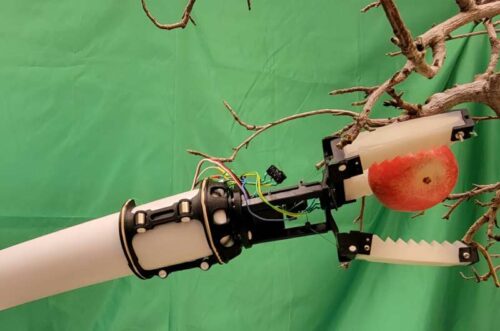
The gripper, weighing approximately two-thirds of a pound, operates with three cables that control fingers made from 3D-printed hard plastic tipped with silicone rubber. These fingers are designed to be gentle enough not to harm the apples yet strong enough to detach them from the tree. Priced at about $30 to manufacture, the gripper features a switch to secure the apple and release it. In tests conducted in an orchard, it successfully harvested over 87.5% of the apples without causing any damage.
Farms across the state hire a few to several hundred workers annually for various orchard tasks such as pollination, pruning, flower thinning, and fruit harvesting. However, with an ageing workforce and fewer migrant labourers, farmers have faced challenges securing sufficient labour during the harvest season.
In response, researchers have been working on robotic systems for apple harvesting. Despite these efforts, the robotic solutions developed are costly and complicated to implement in orchard environments.
Next, the WSU team plans to attach their lightweight gripper to an affordable robotic system they are developing. Inspired by the inflatable tube people see at car dealerships, the robot arm is made from a sturdier, air-filled, soft fabric. Additionally, the researchers are enhancing the system with an onboard camera to direct the arm accurately and a gripper capable of twisting similarly to human hand rotation, aiming to minimise damage to apple stems. They anticipate testing this system in their lab and field conditions later this year.
Reference: Chris Ninatanta et al, Design and Evaluation of a Lightweight Soft Electrical Apple Harvesting Gripper, 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft) (2024). DOI: 10.1109/RoboSoft60065.2024.10521995
