



A new method helps robots hold things by changing their movement instead of squeezing harder. It works for soft, slippery, or shaped objects.
Robots can now better handle fragile, slippery, or uneven objects by adjusting their movements instead of increasing grip strength. Developed by researchers at the University of Surrey in the United Kingdom and published in Nature Machine Intelligence, the new method lets robots sense when an object might slip and respond in real time by changing their motion to secure the object.

This slip-prevention technique mimics how humans instinctively react to slipping objects—by repositioning or adjusting motion rather than squeezing harder. The method reduces the risk of damage and improves control, especially when handling delicate or awkward items. It has strong potential for use in manufacturing, healthcare, logistics, and home assistance.
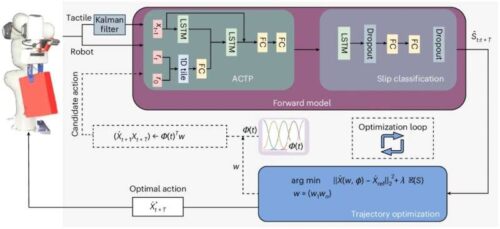
The system uses a predictive control model known as a tactile forward model to anticipate slippage based on the robot’s planned movement. It continuously monitors the interaction between the object and the robot’s hand, allowing real-time adjustments even when dealing with unfamiliar items or paths.
The research is the first to quantify how trajectory modulation—the ability to change motion paths—can prevent slipping in both humans and robots. By relying on motion changes rather than force, robots become more adaptive and reliable in complex real-world environments.
Inspired by how humans grip and adjust, this system avoids excessive force and could improve the safety and performance of robotic systems used in automated settings. The project was conducted in collaboration with multiple institutions and marks a step forward in making robotic systems more capable and human-like in their handling.
Reference: Kiyanoush Nazari et al, Bioinspired trajectory modulation for effective slip control in robot manipulation, Nature Machine Intelligence (2025). DOI: 10.1038/s42256-025-01062-2