



A new multimodal robotic hand designed by USC researchers integrates thermal, inertial, and tactile sensing to enable safe, intelligent manipulation of objects—even in extreme environments.
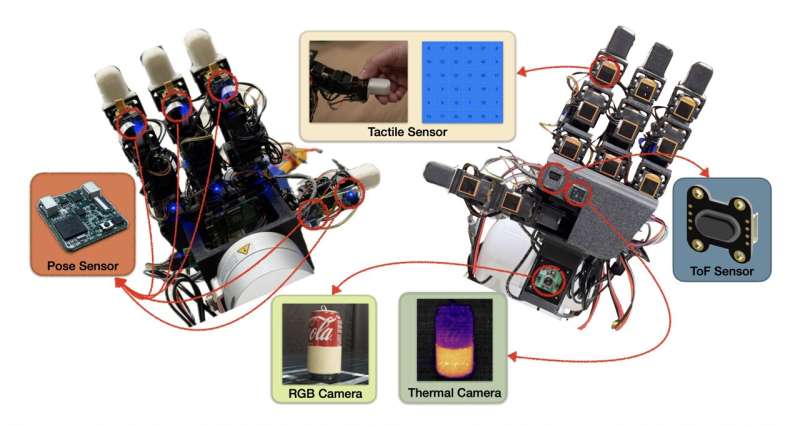
Researchers at the University of Southern California (USC) have developed the MOTIF hand—a next-generation robotic platform that integrates thermal, inertial, depth, tactile, and visual sensor.This multimodal system enhances a robot’s ability to safely interact with objects across diverse settings—from household tasks to industrial maintenance, even in high-temperature environments like foundries and steel mills.

The MOTIF (Multimodal Observation with Thermal, Inertial, and Force sensors) hand builds upon the widely used LEAP robotic hand, extending it with advanced sensing to achieve unprecedented environmental awareness and object handling intelligence. According to lead researchers Daniel Seita, Hanyang Zhou, Wenhao Liu, and Haozhe Lou, the goal was to overcome the limitations of existing robotic hands, which often rely heavily on visual and mechanical input, lacking thermal and inertial feedback essential for real-world dexterity.
In lab evaluations, the team ran two key experiments. One tested the hand’s ability to detect and avoid hot surfaces during object grasping. The other assessed its capability to differentiate objects of identical shape but varying mass through subtle fingertip flicks—made possible by the inertial measurement unit (IMU). The integrated sensors allowed the hand to respond with greater nuance, achieving safer and more precise manipulations.
The MOTIF hand’s unique edge lies in its comprehensive sensor fusion, enabling it to distinguish between similar-looking objects with different physical properties, safely grasp heated tools or cookware, and adapt its grip dynamically based on real-time thermal and force feedback. This could redefine robotic roles in domestic environments, professional kitchens, and high-risk industrial settings. Future upgrades are already in the pipeline, including high-resolution fingertip sensors like the Digit 360 and enhanced multimodal sensing algorithms for more complex in-hand manipulation.