




A new interface lets people teach robots without code. You can show the task, guide the robot, or control it from far away.
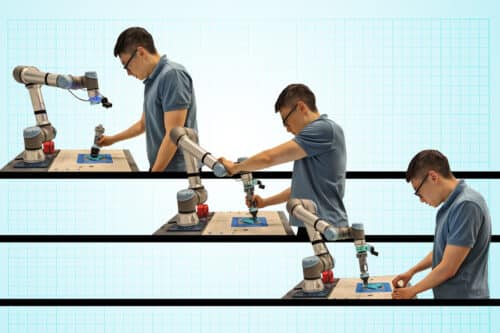
A robot training interface developed by MIT allows people without coding knowledge to teach robots tasks. The system uses a method called “learning from demonstration,” where users train robots through one of three ways: remote control, physical guidance, or direct demonstration. Unlike systems that use only one method, this interface combines all three through a handheld attachment that connects to a robotic arm.
Earlier, teaching robots required programming. That is changing. These robots learn from people through simple interaction. Users train them by guiding from a distance, moving them through tasks, or showing tasks while the robot watches. The MIT-built handheld tool includes sensors and supports all three training ways.
This interface, called the “demonstration interface” (VDI), lets more people train robots and covers a wider range of tasks. The attachment includes sensors and a camera to track movement, position, and force. It works in three modes: remote operation, physical guidance, and live demonstration. Users pick whichever mode fits the task.
For instance, one person might train a robot to handle unsafe material, another might guide it to pack items, and a third might show a drawing the robot can copy. By combining all three methods, the VDI expands what tasks robots can learn and who can teach them.
To test the tool, the MIT team ran trials with workers at a manufacturing center. Volunteers used the VDI with a robotic arm to teach two tasks: pressing pegs into holes and shaping material around a rod. All three training modes were used.
Results showed many users preferred live demonstration. Each method had specific uses. Remote control helped with unsafe or sensitive tasks, physical guidance helped with fine movement, and demonstration worked well for hand-based actions.
This work reflects a shift in robotics toward simpler robot training. MIT’s system may be useful not only in factories, but also in homes, care settings, and other everyday places. Based on user input, further updates are planned, along with studies on how well robots trained this way perform.