


Micro-robotics deals with small-scale robots of micrometres size. A typical macro-scale mobile robot is a self-contained, untethered and re-programmable machine that can perceive, move and learn in a given environment to accomplish a given task repeatedly and with precision.
In his book The Diamond Age, Neal Stephenson opines that countries and other powerful stakeholders are likely to fight silent wars with each other using a very large number of tiny robots, in the future. However, the real culprits behind these micro wars will remain hidden.

Micro-robots, also known as micro-bots, typically have dimensions ranging from a fraction of a millimetre up to several millimetres, and are able to access less than one-millimetre space directly with minimal invasion and untethered operation. Micro-bots are made of sub-millimetre-scale components, such as micro-actuators, micro-sensors and micro-mechanisms, and are constructed using micro-fabrication methods, which are different from conventional macro-scale machining techniques. Their locomotion and physical interaction in a given environment are dominated by micro-scale physical forces and effects. Volume-based forces such as inertial forces, gravity and buoyancy become comparable to surface area and perimeter-based forces such as viscous forces, drag, friction, surface tension and adhesion.
Micro-bots can access hard-to-reach places and offer the promise of extending human presence to locations that are lethal or filthy, thus offering an edge over normal robots. These are inexpensive, unobtrusive and find much wider usage than larger robots.
A micro-bot can be either autonomous or insect-like. An autonomous micro-bot, like any larger robot, includes its own onboard computer to control and pilot the machine, and operates independently. An insect-like micro-bot operates in a fleet of identical units controlled by a central computer. Insect-like robots usually work in large groups as swarms and almost behave like ants in an anthill or bees in a hive.
How micro-bots developed
The famous quote by physicist Richard Feynman in 1959, “There is plenty of room at the bottom,” which triggered the developments in the fields of nanotechnology and bio-nanotechnology, is treated as the birth of micro-system technology (MST). The first ideas of micro-robotics appeared with the emergence of an active investigation of MST, and rapid development of micro-fabrication technologies made it possible to provide micro-components for micro-bots at a reasonable cost.
Integrated circuits (ICs) discovered in 1949 and electronic microscopes helped micro-scale fabrication. With time, miniaturisation technology enabled building smaller and smaller devices as well as enhancing their efficiency. Interestingly, the field of micro-robotics became highly popular with the sci-fi movies Fantastic Voyage in 1966 and Inner Space in 1987, in which miniaturised submarine crews were injected inside the human body to perform non-invasive surgery.
The research and conceptual design of micro-robots commenced in the early 1970s as classified research for the US intelligence agencies for applications such as electronic intercept assignments. As basic miniaturisation support technologies were not fully developed at that time, progress was slow.
Present-day micro-bots were created in the last decade of the 20th century. One of the main challenges was to achieve their movement using the very limited power available from a small, lightweight battery source like a coin cell, or scavenging power from the surrounding environment in the form of vibration or light energy, or using biological motors like flagellated Serratia marcescen to draw chemical power from the surrounding fluid to actuate robotic devices. Progress in scanning electron microscopy (SEM) and scanning probe microscopy (SPM) in 1980s greatly helped the development of micro-robotics.
Initial studies in untethered micro-robotics included bacteria-inspired swimming propulsion, bacteria-propelled beads, steerable electrostatic crawling micro-bots, laser-powered micro-walkers, magnetic resonance imaging (MRI)-driven magnetic beads and magnetically-driven milli-scale nickel robots. Studies also progressed in actuation methods, such as helical propulsion, stick-slip crawling micro-bots, magneto tactic bacteria micro-bot swarms, optically-driven bubble micro-bots and micro-bots driven by a directed laser spot. The current approach is off-board (remote) actuation and control.
A few examples of the current notable developments are a 1024-robot swarm capable of assembling itself into various shapes developed at Harvard University; the program MicroFactory for Macro Products run by Defence Advanced Research Projects Agency (DARPA), an agency of Department of Defence for developing emerging technologies for the US military; and smart, highly-flexible, bio-compatible micro-bots designed in Zurich with the capability to swim through fluids, modify shape automatically when required, and pass through narrow blood vessels and the intricate human systems. There has been a surge in the research work to develop functionalised micro-bots, and the field is growing fast.
How micro-bots function
When layers of platinum and titanium are put on a silicon wafer and electrical voltage is applied, platinum contracts while titanium remains rigid, bending the flat surface, which becomes the motor that moves the limbs of the robots. Sensors are used to measure temperature or electrical pulses. Micro-bots use the same basic technology as computer chips. A hundred-micron silicon chip can contain millions of micro-bots with robot limbs.
Micro-bots are usually powered by shining lasers on tiny solar panels fixed on their backs and run on a fraction of a volt consuming ten-billionths of a watt. However, for micro-bots injected into the brain or body, system lasers would not work as the power source, so magnetic fields are used as an alternative. Micro-bots can usefully be integrated into small systems, such as micro-electromechanical systems (MEMSes) and nano-electromechanical systems (NEMSes), to provide the advantage of reduction in required resources (mass, volume, power, etc.) and the overall cost of the systems.

Micro-bots working together in large numbers create a dense network of parallel, self-organising, re-configurable swarm. These enable applications in the field of human healthcare, such as minimally-invasive diagnosis and treatment inside the human body; biological studies or bio-engineering applications inside microfluidic devices; desktop micro-manufacturing; and mobile sensor networks for environmental and health monitoring. Micro-bots perform targeted therapy by navigating in the cardiovascular system, and have the potential for providing minimally-invasive surgeries and treatments through early diagnosis.
Micro-bots at work in swarms
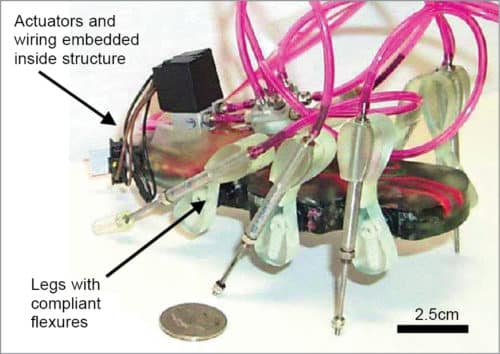
It is possible to imitate insects and worms and develop actuators that effectively reproduce the behaviour of their natural muscle, and have excellent mobility and dexterity. Dielectric elastomers are used, which have the ability to replicate many features of natural muscle.

Rolled actuators are made in a variety of sizes and shapes similar to those of a natural muscle with both silicone and acrylic materials. These have high strains and are flexible to enable motion over rough surfaces.
Robotic platforms using an inchworm-like propulsion system could be used for tasks such as inspection in narrow pipes.
These micro-bots are mostly made of rubber and are resistant to shock and abuse, in sharp contrast to brittle and delicate micro-machined silicon-based devices. Although, individually, micro-bots are small and weak, a number of these acting together in a swarm can cover an area faster and more reliably. These can be transported in space probes to fan out and study the surfaces of planets or moons. Such micro-bots allow extending human approach to locations that are dangerous, dirty or difficult to reach.
Application areas of micro-bots
Micro-bots have a wealth of interesting applications such as autonomously operating inside the human body using natural pathways like blood vessels or gastrointestinal tract for diagnosis and treatment, and delivering drugs to a particular area of the body (called targeted medicine); burrowing into the brain to measure nerve signals; cleaning and rejuvenating cellphone batteries; monitoring and reporting in different environments; testing ideas in networking and communications; and deployment as drones.
Micro-bots are increasingly being used by engineers and scientists leading to further innovations in the fields of engineering, biology and medicine, surgery, defence, environment, etc. Generally, these applications include operation at small scales with the help of high-precision micro-bots in such areas as nanoscale assembly and manufacturing; manipulation of nanoscale objects; mechanical and electrical characterisation at nano-scale; structuring of nano-materials; measurements requiring positioning with nano-scale precision; and many others.
Micro-robotics in biology and medicine
Synthetic biology programmable sensors with memory and signal processing units are used to build genetically-engineered bacteria with magnetic micro-robots. Micro-robots called artificial bacterial flagella (ABF) resemble the natural bacteria Flagella and have a magnetic head.

These can be directed by varying the strength and direction of the rotating magnetic field for targeted delivery deep inside the human body. Micro-bots are useful in drug delivery and fighting diseases such as cancer and heart diseases with minimised surgical procedures. These have the ability to enter the bloodstream, be controlled wirelessly and applied anywhere in the body for treatment of sensitive body parts such as the eye.
With micro-robots propelled in the blood circulatory system, a large number of remote locations in the human body become accessible. With blood vessels diameters varying from 25mm as aorta to 0.01mm as capillaries, propelling micro-devices wirelessly and their locomotion at the microscopic level becomes a challenge. The robots’ shape is programmed for smooth travel through fluids that are dense, viscous or moving at rapid speeds to enable them to become accustomed to the characteristics of the fluid they are travelling through.
For example, when there is a change in viscosity or osmotic concentration, they swiftly alter their shape to maintain speed and maneuverability, without losing control of the direction of motion, mimicking the ability of naturally-occurring micro-organisms to adjust their shape. The natural ability is mimicked by using a controlling electromagnetic field to automatically transform them into the most efficient shape to maximise performance.
Another technique is to use rigid chains of micro- and nano-particles, which produce propulsion when rotated by a magnetic field. On actuation, the micro-swimmers display a spiral motion, resulting in forward propulsion.
Other uses in the medical field include stem cell delivery to a particular region of the body; monitoring of chemical and physical parameters inside the body; and addressing pathways inside the human body like gastrointestinal tract, blood circulatory system or central nervous system. Smart endoscopic pills travel through the gastrointestinal tract and provide real-time feedback from inside the body.
Another useful application is support in repair of tissue cells. Micro-bots attach themselves to the surface of recruited white cells and squeeze their way out through the walls of blood vessels arriving at the injury site, where they assist in the tissue repair process.
Micro-bots for fighting cancer
Scientists from Chonnam National University, South Korea, have developed Bacteriobot, which is capable of fighting cancers. Genetically-modified, non-toxic bacteria are attached to micro-bots with a bead to precisely attack tumour cells in the human body. When injected into the blood stream, they diagnose and treat cancer by migrating and targeting tumours, deliver the drug directly to the tumours and attack the tumours, leaving the healthy cells alone. The patient is spared the side-effects of chemotherapy.
Limitation of Bacteriobot is its capability to detect only solid tumour-forming cancers such as breast cancer and colorectal cancer.
Micro-bots in surgery
One of the most delicate organs in human body is the eye. Multi Scale Robotics Lab, Zurich, has developed a magnetically-guided micro-bot called OctoMag, which is the size of a few human hair (285µm) and has redefined eye surgeries. OctoMag can be controlled magnetically to allow easy access and eliminate the necessity of slicing the eye open. The manipulating system consists of electromagnetic coils, which guide OctoMag for wireless eye surgery.

Micro-bots in space
Using micro-bots in space provides such advantages as decreased requirement of resources and the ability to replace larger and more discrete equipment, thus improving performance and efficiency and reducing cost, which are of main concern in space environment. Based on size and energy requirements, power sources used include coin cells, super capacitors and film batteries built using various polymer materials. Thin-film polymer batteries are more reliable than the rest in meeting power, space and operating temperature requirements. Other energy-scavenging methods include induction, microwave energy transmission and photovoltaics.
Communication methods for micro-bots in space include radio frequency (RF), coil induction and optical technologies. Walking, crawling, swimming or flying are the motions available for micro-bots in space. Flying abilities and aerodynamic features of several insects has provided inspiration for many concepts and inventions of tiny, winged micro-bots such as drones. Their capability to move easily through complex environments makes monitoring, surveillance, search, rescue and obtaining information of the environment easy.
Since digital devices may not respond in changeable situations, artificial neural networks inspired by neural networking within insects are used to solve the problem. Methods used include actuation by electrostatics, electromagnetic, lead-zirconium-titanate and shape memory alloys, which convert thermal energy to kinetic energy. Based on the natural movement of cockroaches, a miniature robot, Sprawlita (a dynamically-stable running hexapod), has been developed using pneumatic motors.
Piezoelectric actuators, which are scaled to small sizes and can be put into a variety of configurations, are used. Copying the way fish and sea insect move, micro-bots are built with aerial and aquatic locomotive abilities using movable, flexible wing designs.
Miniature robots in warfare
Progress in miniaturisation has helped create a new generation of micro-bots for use by the armed forces. These present new capabilities—easy to carry and capable of squeezing in undetected—into otherwise inaccessible spaces. These can be gainfully employed for providing life-saving intelligence, surveillance and reconnaissance (ISR) information to the operator, and relaying it to a communication, command and control centre. Swarming technology provides the ability to full-size robots and micro-bots to autonomously interact to carry out joint missions, responding to moves made as well as data captured by each other.

Micro-bot systems are most effective in field operations for explosives reconnaissance and deactivation, to capture data on enemy positions and locate survivors of natural disasters due to their ability to fly, crawl, climb and wiggle into inaccessible spaces. For example, their mobility, durability, light weight and methods of locomotion can be combined to innovate a device that can be thrown over walls and in through windows, and be steered remotely to capture data using a range of onboard sensors accessories, cameras and other payloads.
Dumbbell-shaped XT is a miniature robot used with a handheld control unit to control and display the real-time video it captures. Together, these are difficult to detect and destroy by the enemy as they are small, operate quietly and are armed with an infrared (IR) optical system that can operate in low light, enabling the operator to operate in darkness. The system can be deployed within seconds, be thrown up as high as 36 metres, and transmits video up to 30 metres indoors and 91 metres outdoors.
Micro-bots are very useful in military, terrorism and natural disaster operations to perform tasks that are otherwise excessively dangerous or dirty for humans to carry out.
Challenges and perspectives
Micro-bots are fast becoming an important member of the robotic family that already includes industrial robots, service robots, medical and rehabilitation robots, cleaning robots, humanoid robots and others. The field of micro-robotics is making huge progress. Many technologies are under development and integration to improve the device design and control, localisation, fabrication and power supply.
Major challenges in the development and commercialisation of micro-bots include innovating efficient remote power sourcing, improving effective and efficient locomotion mechanisms, and the ability to accurately maneuover them. Driving, controlling and propelling the devices have to surmount the challenge of overcoming non-linear physics at this miniature scale.
Forces and effects at small scales are different from those that are experienced at the normal scale. Gravity and inertial forces become less important or even negligible, and on the other side, surface forces or friction forces have striking influence on micro-bot behaviour. The mechanism of this influence is still not fully-understood, and more research is needed to develop complete understanding of the behaviour of micro-bots.
Other challenges are application-specific. For example, in industrial high-precision micro-robotics the challenge is development of fully-automated micro-bot cells for high-throughput operation using feedback from a scanning electron microscope (SEM). The bottleneck faced is the speed of SEM imaging.

Serious challenges faced in targeted medicine utilising mobile micro-bots are to achieve their predictable behaviour and controllability, biocompatibility and non-toxicity.
Untethered micro-bots for monitoring applications, both civilian and defence, require reliable and long-lasting power supply.
These applications involve significant challenges related to the design and communication in micro-bot swarms, depending on environment and application domain, such as flying, crawling or swimming.
Endnote
Research in MEMS and nano-technology progressing relentlessly will result in these devices becoming available at lower costs with a higher level of sophistication by combining sensors, processing power, a type of locomotion, and the method of storing or harvesting energy. One can look forward to medical robots becoming available, having the ability to chart one’s unique physiologies, clean arteries, destroy kidney stones, assist in diagnosis and combating disease, and even fight cancer.
Industrial micro-bots will have the ability to monitor and repair machinery and infrastructure, and may become another tool for manufacturing.
Micro-bots will find use in warfare too, to attack enemies and destroy their weapons, equipment and manufacturing infrastructure, thus reducing their effectiveness.
A day will come when micro-bots would become an integral part of our lives as cellphones are now. However, the danger lies in the multitudes of nearly invisible robots being used by employers, or the power to log and record employees’ activities, seriously affecting their privacy.
The future of micro-robotics is highly optimistic due to the ever-increasing interest of professionals in this comparatively new field. Rapid developments are taking place in many application domains. The coming years should see significant improvements in the performance of micro-bots and an increasing number of innovations. One thing is clear, our life will be more and more influenced by robotic technologies in which micro-robotics will play a significant role.
Dr Deepak Halan is associate professor at School of Management Sciences, Apeejay Stya University
