




In the previous parts of this article, we discussed air defence warfare, electronic warfare, under-sea warfare, surface warfare and strike warfare. Let us take a look at air operations in this part.
Air operations
Though air operations also fall under strike warfare, these are specialised operations of a carrier and, in turn, carrier strike group (CSG). Air operation from carriers is highly complex and highly dangerous. To support air operation, a myriad of electronic systems are installed in the carrier.

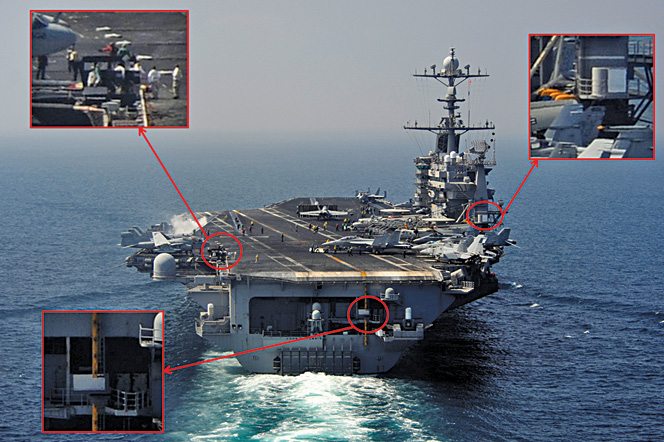
A combat aircraft is launched from the carrier through a system called catapult, which is driven by steam. Since aircraft on a carrier do not have sufficient distance to run and take off, the catapult proves very useful. An aircraft is placed on shuttle of the catapult and launched; aircraft is airborne in just two seconds. Steam pressure that has to be maintained is controlled through electronic systems much similar to industrial systems.
The catapult launches aircraft in air and then the aircraft using its full engine power ascends to an altitude. After that, it leaves for its area of responsibility. Ensuing combat actions are out of purview of this article, however the return leg is covered here.
For retrieving and receiving an aircraft on the carrier, a plethora of electronic systems support the eventual landing on the carrier. But before landing, aircraft must navigate towards the carrier.

Navigation
In the sea, even gigantic carriers appear smaller than a dot for their aircraft flying at heights greater than 10km. At those heights, visually sighting the carrier becomes impossible. To retrieve the launched aircraft, the carrier must reveal its position to the incoming aircraft. The carrier does this through a system called TACtical Air Navigation (TACAN).
TACAN. Through a TACAN transponder the carrier continuously relays its identity in Morse code at a particular frequency. Through appropriate antenna arrangement, it maintains a cardioid radiation pattern for this transmission. Aircraft can receive these signals by tuning their TACAN receivers.
These receivers compare aircraft’s bearing with the direction of the signal reception and give the bearing (direction) of the carrier to the pilot. The TACAN receiver also gives the slant range, known as crow-flight distance, of the carrier.
For this, aircraft’s TACAN receiver interrogates the carrier’s TACAN transponder with an interrogate pulse. The TACAN transponder receives that and, after a delay of 50μs, sends a reply signal. Aircraft’s TACAN receiver receives this reply. Then, by knowing the time at which the receiver had sent the interrogating pulse and the time it received the reply, it calculates the round-trip distance time. This time minus the 50μs delay is the actual round-trip distance time. With the speed of the radio waves known, range is calculated, which is the crow-flight distance.
Typically, a TACAN transponder of a carrier can provide navigational data to approximately 100 aircraft, simultaneously interrogating at a time. With TACAN, an aircraft can accurately navigate to the carrier. Direction and range are displayed in the aircraft’s moving map display as waypoints and also as pointers in the pilot’s head-up display (HUD). (Refer ‘Fighter Aircrafts,’ article published in July 2007, August 2007 and September 2007 issues.)
The next task is to control the movements of outbound and inbound aircraft. Appropriate commands and support are given to inbound aircraft for landing. This is done by carrier air-traffic control, which is generally called amphibious air-traffic control.
Air-traffic control

Since both the carrier and aircraft are moving, air-traffic control is much more complex and elaborate than their land based counterparts. All these operations are controlled from a command centre called carrier air-traffic control centre (CATCC). This command centre is situated on the top-most storey, called Pri-fly, above the flight-deck of a carrier. All aviation-related data like aircraft’s flight plans and approaching aircraft’s status are assembled at this centre for air operations to be monitored and controlled.
For these control operations, many radar systems play a crucial role. Outbound aircraft are allotted a 3D air corridor through which these leave without interfering with incoming aircraft. Incoming aircraft from various locations are first marshalled to another air corridor and then assigned height, direction and speed to fly in a pattern around the CSG.
Depending on the status of the aircraft—whether low on fuel or hit by enemy but in a flyable condition or having technical snag—these are assigned priorities. As incoming aircraft of high priority keep landing, aircraft flying around the CSG are instructed to move to hold pattern around the carrier. As aircraft keep landing, a landing sequence is formed where aircraft trail behind each other by kilometres.
Once aircraft are lined for landing, these are transferred to approach and landing controllers, that help the pilots in landing the aircraft. During high-intensity air operations aircraft come and land every 30 seconds. For this, a radar called marshalling radar is used, which is the air-traffic control radar.
Marshalling radar. The marshalling radar AN/SPN-43 is a 2D air-surveillance S-Band (2GHz-4GHz) radar, dedicated for air-traffic control. It is used for vectoring carrier-bound aircraft into final approach for landing. It also acts as a back-up, short-range, air-search radar for air-defence operations. It provides azimuth and range of detected aircraft from 80.5km (50 miles) to a minimum range of 229m (250 yards), at altitudes from radar horizon to 9144m (30,000 feet).
The radar has an inbuilt Identify Friend or Foe (IFF) system. The radar display console displays all echoes in the area of responsibility in the form of blips. But how can individual aircraft be set apart from these blips? For this, a system called Direct Altitude and Identity Readout (DAIR) is used to identify the aircraft.
DAIR. DAIR is a highly-automated beacon and radar-tracking system. It is used for identifying incoming aircraft and operates as a sort of back-end for marshalling operations, whereas the radar operates as the front-end. Every American combat aircraft has a transponder. This transponder is queried by DAIR through AN/SPN-43 radar.
These transponders give their identity and altitude of the aircraft to DAIR through AN/SPN-43 radar. Then, DAIR superimposes this data as alphanumerals over the blips of corresponding aircraft appearing on display consoles. So mere anonymous blips are replaced by names and their altitudes. This system is also capable of processing and superimposing flight plans, geographic reference points and map lines for enhancing mission planning.
Marshalling radar-DAIR combo is a high-precision system enabling controllers to track every aircraft effectively. Through their consoles, air-traffic controllers can interact with DAIR for tracking a particular aircraft’s flight. Then they give instructions for the pilot through separate communication channels that exist between air-traffic controllers and pilots. They line up aircraft in a queue for landing and then transfer the control to the landing controllers.
In CATCC, there are many personnel, each handling a specific controlling and monitoring task dealing with outbound aircraft, incoming aircraft, landing aircraft, civilian and neutral flights, unidentified blips and the like.

Landing: the mortal challenge
For any pilot, landing his aircraft smoothly is a challenge. But normal pilots come nowhere near their naval counterparts. Naval pilots have to land their aircraft on a moving aircraft carrier, which is the supreme challenge comprising layers of challenges for a pilot’s airmanship because of the landing procedure. So naval pilots are considered a special breed among pilots.
Normally, an aircraft after landing runs over the runway, sheds off the enormous momentum, slows down and stops. But the flight-deck of a carrier is not even one-tenth the length of a runway. So the aircraft has to be arrested and trapped to stop its momentum. All aircraft belonging to carriers have a hook, known as a tail hook, beneath their tails. During landing, pilots touch the runway such that the hook snags a thick arresting cable present on the flight deck. The pilot has an error margin of just centimetres. If missed, the pilot increases power, takes off and makes another attempt.
Now comes the next aspect of the challenge—the runway is not only short but also unstable. It pitches up/down and rolls left/right. The pilot has to land guessing how the runway will move and then land, accordingly. The pilot has to guess that in just fractions of a second. During landing, the pilot first aligns the aircraft to the centreline of the runway from an altitude and gradually descends at a constant speed in a shallow angle; it is called approach. In the meantime, if the flight-deck pitches up, the pilot nudges the throttle to increase speed and hence altitude, and vice-versa. Similarly, if the carrier yaws, the pilot adjusts the aircraft, accordingly, and may have to make more than 100 such adjustments during the approach.
Further, landing at night time on a very short runway of a minimally-lit carrier, which is pitching, rolling, yawing and sliding, is nerve shattering and a mortal challenge. An error caused due to the pilot’s judgement may cost not only his or her life but many other lives and also many aircraft.
Previous generations of pilots had only two optical clues to align the aircraft with respect to the carrier and then land safely. The first was called Fresnel Lens Optical Landing System (FLOLS) for vertical positioning of the aircraft. The second was called Centreline Lights for horizontal positioning of the aircraft. But modern-day pilots have an electronic aid called Precision Approach Landing System (PALS).
Precision Approach Landing System
PALS is really a pal for naval pilots. It has three modes: instrumented carrier landing system (ICLS) mode, automatic carrier landing system (ACLS) mode and talk-down mode.
ICLS mode. For an aircraft to land, it has to maintain a constant recommended speed, while losing altitude gradually, until touchdown on the runway. How it loses altitude with respect to the runway is called glideslope. For a runway on ground, the glideslope never changes but since the carrier rocks up and down, the glideslope also varies accordingly and is never constant. So a mere pitch up of the flight deck is drastic for the landing aircraft. Pilot of the aircraft must be made aware of this changing glideslope. This is done through a system called ICLS centred on a radar system called AN/SPN-41.
Though technically not an exact radar system, AN/SPN-41 engages in one-way transmission to the landing aircraft in Ku-band. It has a set of radars: a centreline unit and a flight deck unit. The former is situated beneath the centreline of the runway and the latter is situated slightly high on the flight-deck. Using sector scanning, both units acquire and track the approaching aircraft. The fightdeck unit and centreline unit respectively measure the aircraft’s vertical and horizontal deviation from the glideslope. Then AN/SPN-41 broadcasts the positional difference in pulse mode in Ku-band in real-time.

A system called aircraft approach control system (ACCS) present in the aircraft receives these signals. It extracts the positional information of the aircraft with respect to the glideslope from these signals. It then converts these signals as a set of horizontal and vertical lines on the pilot’s HUD.
The vertical line indicates the position of the aircraft with respect to the centreline of the runway. It appears in the direction that the aircraft has to move so as to align with the centreline of the runway. The horizontal line indicates how much the aircraft must gain or lose altitude to fit in the glideslope.
When these two lines form a crosshair, the aircraft can be perfectly aligned with the glideslope. The pilot, after aligning with the glideslope, can gently nudge his controls to stay in the pitching glideslope until touchdown.
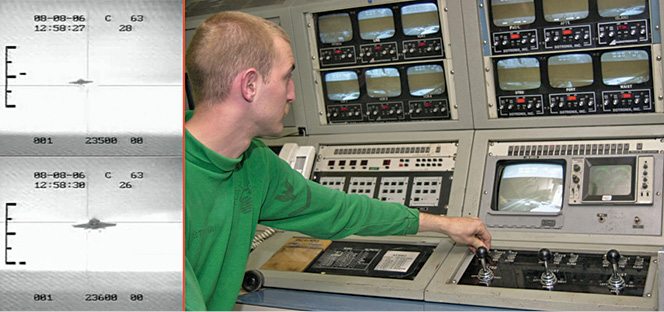
Talk-down mode. In this mode, the pilot is instructed by landing signal officers (LSOs). They work from an LSO console situated at the edge of the flight deck. This console gathers all flight data of the approaching aircraft from many systems. The LSO console computes the required flight path for landing, monitors the flight path of aircraft and the difference that the pilot has to cover. It takes inputs from the integrated launch and recovery television system (ILARTS), AN/SPN-44 radar and wind-measurement system.
ILARTS. This is a camera-and-television system with all-weather capability. In simple words, its cameras can videograph both during day and night with equal clarity. ILARTS has remotely-operated cameras at many places on the flight-deck. These cameras videograph the approaching aircraft along with its relative position with the horizon. ILARTS then adds glideslope crosshairs parameters and other data to that imagery. The resultant composite video is displayed at the LSO console, CATCC and other important centres like CDC. The aircraft’s alignment with respect to the horizon indicates the LSO whether the aircraft should climb up or descend so as to capture the glideslope of the pitching flight deck.
Fig. 27 indicates the two scenarios of an aircraft approaching for landing. The scale-like symbol on the left indicates acceptable limits for the aircraft in the vertical axis. The dash symbol near this scale indicates the position of the aircraft. The aircraft has to be ideally at the centre of the crosshairs. The dash indicates the actual position of the aircraft with respect to the glideslope. If the aircraft is not within this envelope, it is waved off for another approach. These symbols are generated by ILARTS and fed to the LSO console.
AN/SPN-44. This is known as a range-rate radar. It detects approaching aircraft, tracks it and calculates its speed (both relative to the carrier and true speed). It then provides this data to the LSO console. Supplied with this accurate information on the speed of the approaching aircraft, LSOs can wave off the aircraft attempting to land at an unsafe speed.
Wind-measurement system. This is nothing but a traditional wind-measuring system based on an anemometer. It is used to measure headwind, tailwind and crosswind speeds. These winds can terribly affect the aircraft’s flight by shifting the aircraft. Headwinds resist flight, tailwinds push the aircraft forward and crosswinds laterally move the aircraft out of glideslope. These winds are troublesome. Data from the system is fed to the LSOs, who, in turn, intimate the same to the pilot. The pilot then flies in a way offsetting the effect of these winds.
Based on these inputs, LSOs communicate with the approaching pilot, who constantly adjusts aircraft’s position based on the voice commands given by LSOs.
ACLS mode. Imagine that a pilot is returning to the carrier from a battlefield, which is located 500km away, after bombing enemy targets and evading enemy air defence missiles. On the way back, he or she had to intensely fight with enemy fighter aircraft. Now, on returning to the carrier, the pilot has to land his aircraft under pitch-black conditions. The pilot’s physical state is not as alert as it was when he or she left for the mission; the intense adrenalin rush has tired the pilot, making landing of the aircraft even more difficult. Anyone in this situation would dream of a system that lands the aircraft automatically without any inputs. ACLS is that dream system.

Parts of this system exist in both the carrier and the aircraft. Only ACLS-equipped aircraft can be landed automatically on a carrier. Basically, in an ACLS, autopilot of the aircraft is controlled by the carrier. For this, position of the aircraft is tracked through Ka-band tracking radar AN/SPN-46 in the carrier. Instructions for the autopilot are transmitted to the aircraft. There are two radars guiding each aircraft.
The sequence starts from a point called acquisition window during approach of the aircraft. At this point, the tracking radar acquires the aircraft and starts tracking it. At this point the pilot is indicated through cockpit indicators that the aircraft is being acquired by ACLS. The pilot then puts the aircraft under autopilot in landing mode. The tracking radar uses a conical scan antenna and continuously interrogates a radar beacon present in the aircraft. This beacon responds in X-band for interrogation of the tracking radar. Replies of the beacon are continuously plotted on the ACLS computer to derive the aircraft’s location with respect to the glideslope.
Instructions to the autopilot are transmitted in real-time through a UHF datalink. Autopilot has a component called approach power compensator (APC), which increases or decreases the engine’s power to vary the altitude according to the glideslope requirement. The pilot has warning lights that give indications to abort landing and try for another attempt. Similarly, at any point of time, the pilot can disengage from autopilot by applying pressure on the control stick to take control of the aircraft.
The irony is that pilots do not use this mode! They say that they do not want a computer to land their aircraft. They instead use the instrumented mode and talk-down mode. So this mode only serves as a fallback option during haze and fog.
Mission planning systems
Air operations are planned taking a large number of inputs from various departments and workspaces of the carrier. The following systems help in that planning.
Aviation data management and control system (ADMACS). This is a tactical, real-time LAN used for an aviation-related information-management system. This system helps to manage the aircraft’s launch and recovery operations. This network, extending to aviation-related spaces of the carrier, facilitates strike operation planners with necessary details about aircraft availability and aircraft under maintenance and repair, among others.
Aviation weapons information management systems (AWIMS). This is a data management system to collect, distribute and display information used to manage weapons inventory in a carrier.
Integrated shipboard information system (ISIS). It is a data processing and display system. It integrates all crucial information like tactical, navigational, air operations and meteorological-related data and displays these in a single usable format. To the captain of the ship, entire data regarding the carrier is displayed. Down the hierarchy, only data relevant to a particular function is displayed at various work centres.
In the fifth and concluding part we will discuss command and control operations as well as cruise control operations.
