




What if a wheelchair could adapt to your movements, learning when to take control and when to follow your lead? Read more!
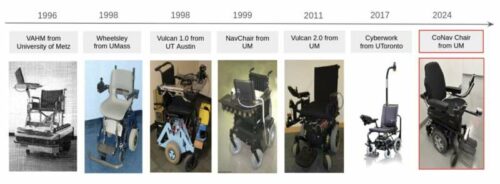
Researchers at the University of Michigan have developed CoNav, a wheelchair controlled by a Robot Operating System (ROS) framework. The team aimed to create a wheelchair that addresses these issues. Their solution, the CoNav chair, allows users to partially control their movement while enabling autonomous navigation in various environments.

The CoNav chair stands apart from fully autonomous wheelchairs, which have been less effective in complex and dynamic environments. Rather than operating autonomously, the CoNav chair offers a collaborative navigation experience, allowing user interaction alongside its autonomous capabilities.
The wheelchair includes several key components: the chair structure, wheels, a joystick, and various sensors. Users can control the chair’s movement using the joystick to indicate their desired direction.
The wheelchair features adaptive control, blending user input with its navigation plan. Instead of strictly following joystick commands or ignoring them, it adjusts its movement based on the user’s direction and plan.

If users consistently steer the chair, the wheelchair learns to prioritize its input over its navigation plan. When users stop guiding the chair, the system takes control, ensuring safe navigation.
CoNav is built to give users a sense of control, boosting their trust in the chair. By combining autonomous and manual control, the chair ensures smoother navigation, minimizing sudden movements and the need for trajectory corrections.
The team tested their chair in real-world indoor experiments, including static and moving obstacles. The results showed CoNav outperforming fully autonomous and manually controlled wheelchairs in efficiency, safety, and user satisfaction.
The researchers found that CoNav enabled users to reach their destination faster than manually operated wheelchairs. Those who tested the chair also reported feeling more confident, as they felt in control of its movements while benefiting from its autonomous navigation features when needed.
The CoNav chair could be used in healthcare settings to assist individuals with temporary or permanent physical disabilities. As cities become smarter and more connected, the chair could integrate with other IoT-based navigation tools, such as smart crosswalks, elevators, or indoor guidance systems, helping users navigate urban environments safely.
Reference: Yifan Xu et al, CoNav Chair: Design of a ROS-based Smart Wheelchair for Shared Control Navigation in the Built Environment, arXiv (2025). DOI: 10.48550/arxiv.2501.09680
