


Imagine a robot that can handle any object—doors, drawers, appliances—without being trained on them. Discover how a new approach is making this possible!
Researchers from Peking University, the Beijing Institute for General Artificial Intelligence, and Queen Mary University of London have introduced Tac-Man, a new tactile feedback-based method that could enhance robots’ ability to manipulate a wide range of articulated objects—such as doors, drawers, and appliances—without prior exposure to them or knowledge of their underlying mechanisms.
Tac-Man, the approach developed by the team, is designed to address the limitations of conventional techniques for robotic manipulation. It enables robots to perform more effectively in dynamic environments and handle tasks involving objects they were not explicitly programmed to interact with.
The Tac-Man approach utilizes a sensing system that continuously monitors changes in the contact patterns between robots and objects. By analyzing this tactile data, the system can detect and adapt to any deviations from the intended movements in real-time.
The main advantage of this method is its ability to enable robots to adjust their actions instantly, modifying their grip and movements based on the tactile feedback they receive. Unlike previous methods, Tac-Man emphasises tactile feedback rather than visual cues, resulting in more natural and adaptive interactions.
The approach developed by the research team mimics human interaction with objects: after making contact, the robot adjusts its grip to maintain stability and moves the object carefully, gradually learning the best way to manipulate it. The robot fine-tunes its grip and movements by continuously gathering tactile feedback, resulting in more natural motion and eliminating the need for object-specific programming.
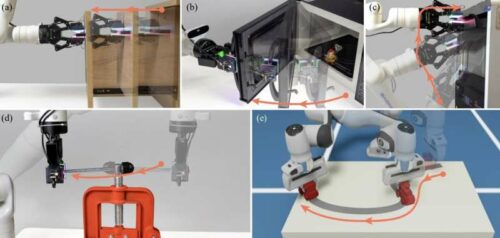
The researchers tested Tac-Man in a series of real-world experiments and found that it enabled robots to manipulate various articulated objects, adapting to their properties over time. The objects tested included drawers with distinct sliding mechanisms, cabinet doors with hinges in different positions, and other furniture items featuring complex rotational mechanisms.
The new approach developed by this research group has the potential to be further advanced and tested across a wider range of robotic systems. In the future, it could enhance robot performance in tasks that involve delicate interactions with objects under uncertain conditions.
Reference: Zihang Zhao et al, Tac-Man: Tactile-Informed Prior-Free Manipulation of Articulated Objects, IEEE Transactions on Robotics (2024). DOI: 10.1109/TRO.2024.3508134.
