


A control approach simplifies tendon-driven robots, enabling motion and section control, opening the way for use in surgery, inspection, and tight spaces.
Researchers at the Indian Institute of Technology Gandhinagar have proposed a framework to simplify control of tendon-driven continuum robots (TDCRs), achieving millimetre-level precision and supporting use in surgical robotics, inspection, and surveillance.

The method introduces a concept called virtual actuation space (VAS). Instead of controlling each tendon, it represents the motion of each robot section using two parameters: direction and magnitude. This reduces computational load and enables control of different sections, even when tendons are interconnected. As a result, it improves tracking accuracy and makes real-time control more practical.
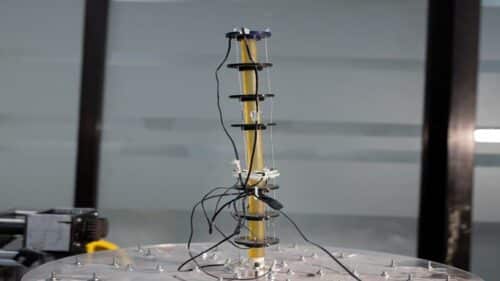
To evaluate the approach, the researchers developed a two-section robotic arm. Six motors were used to control tendon lengths for bending. A motion capture camera tracked the robot’s movement using LED markers. A computer system compared the robot’s position with the desired position and adjusted the motors to correct deviations.
In one experiment, the robot’s tip was required to reach five points arranged in a pentagon. In another, it followed paths shaped like a two-petalled flower, a spiral, a circle, and a curve. Across these tasks, the movement error remained below one per cent. The experiments also showed that the two sections could operate independently, with one section bending while the other remained straight depending on the requirement.
A tendon-driven continuum robot (TDCR) uses cables attached along a backbone, and when these tendons are pulled, the robot bends in different directions, allowing motion in a compact form while remaining simple to build. However, controlling TDCRs is difficult due to their high degrees of freedom, as they can bend and twist in many ways. The challenge increases in multi-section designs where tendons in one section affect others, making it hard to predict motion and determine the correct tendon inputs for a desired shape.
The method can also be extended to robots with more sections. It supports use cases in industrial automation and inspection in confined spaces, including systems such as aircraft engines.
